mirror of
https://github.com/blakeblackshear/frigate.git
synced 2026-02-05 18:55:23 +03:00
Merge branch 'dev' of github.com:blakeblackshear/frigate into audio-events
This commit is contained in:
commit
8055fbc6e8
@ -37,42 +37,61 @@
|
|||||||
"onAutoForward": "silent"
|
"onAutoForward": "silent"
|
||||||
}
|
}
|
||||||
},
|
},
|
||||||
"extensions": [
|
"customizations": {
|
||||||
"ms-python.vscode-pylance",
|
"vscode": {
|
||||||
"ms-python.python",
|
"extensions": [
|
||||||
"visualstudioexptteam.vscodeintellicode",
|
"ms-python.python",
|
||||||
"mhutchie.git-graph",
|
"ms-python.vscode-pylance",
|
||||||
"ms-azuretools.vscode-docker",
|
"ms-python.black-formatter",
|
||||||
"streetsidesoftware.code-spell-checker",
|
"visualstudioexptteam.vscodeintellicode",
|
||||||
"esbenp.prettier-vscode",
|
"mhutchie.git-graph",
|
||||||
"dbaeumer.vscode-eslint",
|
"ms-azuretools.vscode-docker",
|
||||||
"mikestead.dotenv",
|
"streetsidesoftware.code-spell-checker",
|
||||||
"csstools.postcss",
|
"esbenp.prettier-vscode",
|
||||||
"blanu.vscode-styled-jsx",
|
"dbaeumer.vscode-eslint",
|
||||||
"bradlc.vscode-tailwindcss"
|
"mikestead.dotenv",
|
||||||
],
|
"csstools.postcss",
|
||||||
"settings": {
|
"blanu.vscode-styled-jsx",
|
||||||
"remote.autoForwardPorts": false,
|
"bradlc.vscode-tailwindcss",
|
||||||
"python.linting.pylintEnabled": true,
|
"ms-python.isort",
|
||||||
"python.linting.enabled": true,
|
"charliermarsh.ruff"
|
||||||
"python.formatting.provider": "black",
|
],
|
||||||
"python.languageServer": "Pylance",
|
"settings": {
|
||||||
"editor.formatOnPaste": false,
|
"remote.autoForwardPorts": false,
|
||||||
"editor.formatOnSave": true,
|
"python.linting.pylintEnabled": true,
|
||||||
"editor.formatOnType": true,
|
"python.linting.enabled": true,
|
||||||
"python.testing.pytestEnabled": false,
|
"python.formatting.provider": "none",
|
||||||
"python.testing.unittestEnabled": true,
|
"python.languageServer": "Pylance",
|
||||||
"python.testing.unittestArgs": ["-v", "-s", "./frigate/test"],
|
"editor.formatOnPaste": false,
|
||||||
"files.trimTrailingWhitespace": true,
|
"editor.formatOnSave": true,
|
||||||
"eslint.workingDirectories": ["./web"],
|
"editor.formatOnType": true,
|
||||||
"[json][jsonc]": {
|
"python.testing.pytestEnabled": false,
|
||||||
"editor.defaultFormatter": "esbenp.prettier-vscode"
|
"python.testing.unittestEnabled": true,
|
||||||
},
|
"python.testing.unittestArgs": ["-v", "-s", "./frigate/test"],
|
||||||
"[jsx][js][tsx][ts]": {
|
"files.trimTrailingWhitespace": true,
|
||||||
"editor.codeActionsOnSave": ["source.addMissingImports", "source.fixAll"],
|
"eslint.workingDirectories": ["./web"],
|
||||||
"editor.tabSize": 2
|
"isort.args": ["--settings-path=./pyproject.toml"],
|
||||||
},
|
"[python]": {
|
||||||
"cSpell.ignoreWords": ["rtmp"],
|
"editor.defaultFormatter": "ms-python.black-formatter",
|
||||||
"cSpell.words": ["preact"]
|
"editor.formatOnSave": true,
|
||||||
|
"editor.codeActionsOnSave": {
|
||||||
|
"source.fixAll": true,
|
||||||
|
"source.organizeImports": true
|
||||||
|
}
|
||||||
|
},
|
||||||
|
"[json][jsonc]": {
|
||||||
|
"editor.defaultFormatter": "esbenp.prettier-vscode"
|
||||||
|
},
|
||||||
|
"[jsx][js][tsx][ts]": {
|
||||||
|
"editor.codeActionsOnSave": [
|
||||||
|
"source.addMissingImports",
|
||||||
|
"source.fixAll"
|
||||||
|
],
|
||||||
|
"editor.tabSize": 2
|
||||||
|
},
|
||||||
|
"cSpell.ignoreWords": ["rtmp"],
|
||||||
|
"cSpell.words": ["preact", "astype", "hwaccel", "mqtt"]
|
||||||
|
}
|
||||||
|
}
|
||||||
}
|
}
|
||||||
}
|
}
|
||||||
|
|||||||
@ -2,6 +2,12 @@
|
|||||||
|
|
||||||
set -euxo pipefail
|
set -euxo pipefail
|
||||||
|
|
||||||
|
# Cleanup the old github host key
|
||||||
|
sed -i -e '/AAAAB3NzaC1yc2EAAAABIwAAAQEAq2A7hRGmdnm9tUDbO9IDSwBK6TbQa+PXYPCPy6rbTrTtw7PHkccKrpp0yVhp5HdEIcKr6pLlVDBfOLX9QUsyCOV0wzfjIJNlGEYsdlLJizHhbn2mUjvSAHQqZETYP81eFzLQNnPHt4EVVUh7VfDESU84KezmD5QlWpXLmvU31\/yMf+Se8xhHTvKSCZIFImWwoG6mbUoWf9nzpIoaSjB+weqqUUmpaaasXVal72J+UX2B+2RPW3RcT0eOzQgqlJL3RKrTJvdsjE3JEAvGq3lGHSZXy28G3skua2SmVi\/w4yCE6gbODqnTWlg7+wC604ydGXA8VJiS5ap43JXiUFFAaQ==/d' ~/.ssh/known_hosts
|
||||||
|
# Add new github host key
|
||||||
|
curl -L https://api.github.com/meta | jq -r '.ssh_keys | .[]' | \
|
||||||
|
sed -e 's/^/github.com /' >> ~/.ssh/known_hosts
|
||||||
|
|
||||||
# Frigate normal container runs as root, so it have permission to create
|
# Frigate normal container runs as root, so it have permission to create
|
||||||
# the folders. But the devcontainer runs as the host user, so we need to
|
# the folders. But the devcontainer runs as the host user, so we need to
|
||||||
# create the folders and give the host user permission to write to them.
|
# create the folders and give the host user permission to write to them.
|
||||||
|
|||||||
@ -1,6 +1,6 @@
|
|||||||
name: EdgeTpu Support Request
|
name: Detector Support Request
|
||||||
description: Support for setting up EdgeTPU in Frigate
|
description: Support for setting up object detector in Frigate (Coral, OpenVINO, TensorRT, etc.)
|
||||||
title: "[EdgeTPU Support]: "
|
title: "[Detector Support]: "
|
||||||
labels: ["support", "triage"]
|
labels: ["support", "triage"]
|
||||||
assignees: []
|
assignees: []
|
||||||
body:
|
body:
|
||||||
26
.github/workflows/ci.yml
vendored
26
.github/workflows/ci.yml
vendored
@ -6,6 +6,11 @@ on:
|
|||||||
- dev
|
- dev
|
||||||
- master
|
- master
|
||||||
|
|
||||||
|
# only run the latest commit to avoid cache overwrites
|
||||||
|
concurrency:
|
||||||
|
group: ${{ github.ref }}
|
||||||
|
cancel-in-progress: true
|
||||||
|
|
||||||
env:
|
env:
|
||||||
PYTHON_VERSION: 3.9
|
PYTHON_VERSION: 3.9
|
||||||
|
|
||||||
@ -14,6 +19,15 @@ jobs:
|
|||||||
runs-on: ubuntu-latest
|
runs-on: ubuntu-latest
|
||||||
name: Image Build
|
name: Image Build
|
||||||
steps:
|
steps:
|
||||||
|
- name: Remove unnecessary files
|
||||||
|
run: |
|
||||||
|
sudo rm -rf /usr/share/dotnet
|
||||||
|
sudo rm -rf /usr/local/lib/android
|
||||||
|
sudo rm -rf /opt/ghc
|
||||||
|
- id: lowercaseRepo
|
||||||
|
uses: ASzc/change-string-case-action@v5
|
||||||
|
with:
|
||||||
|
string: ${{ github.repository }}
|
||||||
- name: Check out code
|
- name: Check out code
|
||||||
uses: actions/checkout@v3
|
uses: actions/checkout@v3
|
||||||
- name: Set up QEMU
|
- name: Set up QEMU
|
||||||
@ -21,7 +35,7 @@ jobs:
|
|||||||
- name: Set up Docker Buildx
|
- name: Set up Docker Buildx
|
||||||
uses: docker/setup-buildx-action@v2
|
uses: docker/setup-buildx-action@v2
|
||||||
- name: Log in to the Container registry
|
- name: Log in to the Container registry
|
||||||
uses: docker/login-action@f4ef78c080cd8ba55a85445d5b36e214a81df20a
|
uses: docker/login-action@465a07811f14bebb1938fbed4728c6a1ff8901fc
|
||||||
with:
|
with:
|
||||||
registry: ghcr.io
|
registry: ghcr.io
|
||||||
username: ${{ github.actor }}
|
username: ${{ github.actor }}
|
||||||
@ -31,23 +45,23 @@ jobs:
|
|||||||
- name: Create short sha
|
- name: Create short sha
|
||||||
run: echo "SHORT_SHA=${GITHUB_SHA::7}" >> $GITHUB_ENV
|
run: echo "SHORT_SHA=${GITHUB_SHA::7}" >> $GITHUB_ENV
|
||||||
- name: Build and push
|
- name: Build and push
|
||||||
uses: docker/build-push-action@v3
|
uses: docker/build-push-action@v4
|
||||||
with:
|
with:
|
||||||
context: .
|
context: .
|
||||||
push: true
|
push: true
|
||||||
platforms: linux/amd64,linux/arm64,linux/arm/v7
|
platforms: linux/amd64,linux/arm64
|
||||||
target: frigate
|
target: frigate
|
||||||
tags: |
|
tags: |
|
||||||
ghcr.io/blakeblackshear/frigate:${{ github.ref_name }}-${{ env.SHORT_SHA }}
|
ghcr.io/${{ steps.lowercaseRepo.outputs.lowercase }}:${{ github.ref_name }}-${{ env.SHORT_SHA }}
|
||||||
cache-from: type=gha
|
cache-from: type=gha
|
||||||
cache-to: type=gha,mode=max
|
cache-to: type=gha,mode=max
|
||||||
- name: Build and push TensorRT
|
- name: Build and push TensorRT
|
||||||
uses: docker/build-push-action@v3
|
uses: docker/build-push-action@v4
|
||||||
with:
|
with:
|
||||||
context: .
|
context: .
|
||||||
push: true
|
push: true
|
||||||
platforms: linux/amd64
|
platforms: linux/amd64
|
||||||
target: frigate-tensorrt
|
target: frigate-tensorrt
|
||||||
tags: |
|
tags: |
|
||||||
ghcr.io/blakeblackshear/frigate:${{ github.ref_name }}-${{ env.SHORT_SHA }}-tensorrt
|
ghcr.io/${{ steps.lowercaseRepo.outputs.lowercase }}:${{ github.ref_name }}-${{ env.SHORT_SHA }}-tensorrt
|
||||||
cache-from: type=gha
|
cache-from: type=gha
|
||||||
|
|||||||
24
.github/workflows/dependabot-auto-merge.yaml
vendored
Normal file
24
.github/workflows/dependabot-auto-merge.yaml
vendored
Normal file
@ -0,0 +1,24 @@
|
|||||||
|
name: dependabot-auto-merge
|
||||||
|
on: pull_request
|
||||||
|
|
||||||
|
permissions:
|
||||||
|
contents: write
|
||||||
|
|
||||||
|
jobs:
|
||||||
|
dependabot-auto-merge:
|
||||||
|
runs-on: ubuntu-latest
|
||||||
|
if: github.actor == 'dependabot[bot]'
|
||||||
|
steps:
|
||||||
|
- name: Get Dependabot metadata
|
||||||
|
id: metadata
|
||||||
|
uses: dependabot/fetch-metadata@v1
|
||||||
|
with:
|
||||||
|
github-token: ${{ secrets.GITHUB_TOKEN }}
|
||||||
|
- name: Enable auto-merge for Dependabot PRs
|
||||||
|
if: steps.metadata.outputs.dependency-type == 'direct:development' && (steps.metadata.outputs.update-type == 'version-update:semver-minor' || steps.metadata.outputs.update-type == 'version-update:semver-patch')
|
||||||
|
run: |
|
||||||
|
gh pr review --approve "$PR_URL"
|
||||||
|
gh pr merge --auto --squash "$PR_URL"
|
||||||
|
env:
|
||||||
|
PR_URL: ${{ github.event.pull_request.html_url }}
|
||||||
|
GITHUB_TOKEN: ${{ secrets.GITHUB_TOKEN }}
|
||||||
45
.github/workflows/maintain_cache.yml
vendored
Normal file
45
.github/workflows/maintain_cache.yml
vendored
Normal file
@ -0,0 +1,45 @@
|
|||||||
|
name: Maintain Cache
|
||||||
|
|
||||||
|
on:
|
||||||
|
schedule:
|
||||||
|
- cron: "13 0 * * 0,4"
|
||||||
|
|
||||||
|
env:
|
||||||
|
PYTHON_VERSION: 3.9
|
||||||
|
|
||||||
|
jobs:
|
||||||
|
multi_arch_build:
|
||||||
|
runs-on: ubuntu-latest
|
||||||
|
name: Image Build
|
||||||
|
steps:
|
||||||
|
- name: Remove unnecessary files
|
||||||
|
run: |
|
||||||
|
sudo rm -rf /usr/share/dotnet
|
||||||
|
sudo rm -rf /usr/local/lib/android
|
||||||
|
sudo rm -rf /opt/ghc
|
||||||
|
- id: lowercaseRepo
|
||||||
|
uses: ASzc/change-string-case-action@v5
|
||||||
|
with:
|
||||||
|
string: ${{ github.repository }}
|
||||||
|
- name: Check out code
|
||||||
|
uses: actions/checkout@v3
|
||||||
|
- name: Set up QEMU
|
||||||
|
uses: docker/setup-qemu-action@v2
|
||||||
|
- name: Set up Docker Buildx
|
||||||
|
uses: docker/setup-buildx-action@v2
|
||||||
|
- name: Log in to the Container registry
|
||||||
|
uses: docker/login-action@465a07811f14bebb1938fbed4728c6a1ff8901fc
|
||||||
|
with:
|
||||||
|
registry: ghcr.io
|
||||||
|
username: ${{ github.actor }}
|
||||||
|
password: ${{ secrets.GITHUB_TOKEN }}
|
||||||
|
- name: Create version file
|
||||||
|
run: make version
|
||||||
|
- name: Build and push
|
||||||
|
uses: docker/build-push-action@v4
|
||||||
|
with:
|
||||||
|
context: .
|
||||||
|
push: false
|
||||||
|
platforms: linux/amd64,linux/arm64
|
||||||
|
target: frigate
|
||||||
|
cache-from: type=gha
|
||||||
16
.github/workflows/pull_request.yml
vendored
16
.github/workflows/pull_request.yml
vendored
@ -65,16 +65,22 @@ jobs:
|
|||||||
- name: Check out the repository
|
- name: Check out the repository
|
||||||
uses: actions/checkout@v3
|
uses: actions/checkout@v3
|
||||||
- name: Set up Python ${{ env.DEFAULT_PYTHON }}
|
- name: Set up Python ${{ env.DEFAULT_PYTHON }}
|
||||||
uses: actions/setup-python@v4.4.0
|
uses: actions/setup-python@v4.6.1
|
||||||
with:
|
with:
|
||||||
python-version: ${{ env.DEFAULT_PYTHON }}
|
python-version: ${{ env.DEFAULT_PYTHON }}
|
||||||
- name: Install requirements
|
- name: Install requirements
|
||||||
run: |
|
run: |
|
||||||
pip install pip
|
python3 -m pip install -U pip
|
||||||
pip install -r requirements-dev.txt
|
python3 -m pip install -r requirements-dev.txt
|
||||||
- name: Lint
|
- name: Check black
|
||||||
run: |
|
run: |
|
||||||
python3 -m black frigate --check
|
black --check --diff frigate migrations docker *.py
|
||||||
|
- name: Check isort
|
||||||
|
run: |
|
||||||
|
isort --check --diff frigate migrations docker *.py
|
||||||
|
- name: Check ruff
|
||||||
|
run: |
|
||||||
|
ruff check frigate migrations docker *.py
|
||||||
|
|
||||||
python_tests:
|
python_tests:
|
||||||
runs-on: ubuntu-latest
|
runs-on: ubuntu-latest
|
||||||
|
|||||||
3
.gitignore
vendored
3
.gitignore
vendored
@ -4,7 +4,8 @@
|
|||||||
debug
|
debug
|
||||||
.vscode/*
|
.vscode/*
|
||||||
!.vscode/launch.json
|
!.vscode/launch.json
|
||||||
config/config.yml
|
config/*
|
||||||
|
!config/*.example
|
||||||
models
|
models
|
||||||
*.mp4
|
*.mp4
|
||||||
*.ts
|
*.ts
|
||||||
|
|||||||
44
Dockerfile
44
Dockerfile
@ -27,7 +27,7 @@ RUN --mount=type=tmpfs,target=/tmp --mount=type=tmpfs,target=/var/cache/apt \
|
|||||||
FROM wget AS go2rtc
|
FROM wget AS go2rtc
|
||||||
ARG TARGETARCH
|
ARG TARGETARCH
|
||||||
WORKDIR /rootfs/usr/local/go2rtc/bin
|
WORKDIR /rootfs/usr/local/go2rtc/bin
|
||||||
RUN wget -qO go2rtc "https://github.com/AlexxIT/go2rtc/releases/download/v0.1-rc.6/go2rtc_linux_${TARGETARCH}" \
|
RUN wget -qO go2rtc "https://github.com/AlexxIT/go2rtc/releases/download/v1.5.0/go2rtc_linux_${TARGETARCH}" \
|
||||||
&& chmod +x go2rtc
|
&& chmod +x go2rtc
|
||||||
|
|
||||||
|
|
||||||
@ -136,17 +136,17 @@ RUN apt-get -qq update \
|
|||||||
RUN wget -q https://bootstrap.pypa.io/get-pip.py -O get-pip.py \
|
RUN wget -q https://bootstrap.pypa.io/get-pip.py -O get-pip.py \
|
||||||
&& python3 get-pip.py "pip"
|
&& python3 get-pip.py "pip"
|
||||||
|
|
||||||
RUN if [ "${TARGETARCH}" = "arm" ]; \
|
|
||||||
then echo "[global]" > /etc/pip.conf \
|
|
||||||
&& echo "extra-index-url=https://www.piwheels.org/simple" >> /etc/pip.conf; \
|
|
||||||
fi
|
|
||||||
|
|
||||||
COPY requirements.txt /requirements.txt
|
COPY requirements.txt /requirements.txt
|
||||||
RUN pip3 install -r requirements.txt
|
RUN pip3 install -r requirements.txt
|
||||||
|
|
||||||
COPY requirements-wheels.txt /requirements-wheels.txt
|
COPY requirements-wheels.txt /requirements-wheels.txt
|
||||||
RUN pip3 wheel --wheel-dir=/wheels -r requirements-wheels.txt
|
RUN pip3 wheel --wheel-dir=/wheels -r requirements-wheels.txt
|
||||||
|
|
||||||
|
# Make this a separate target so it can be built/cached optionally
|
||||||
|
FROM wheels as trt-wheels
|
||||||
|
ARG DEBIAN_FRONTEND
|
||||||
|
ARG TARGETARCH
|
||||||
|
|
||||||
# Add TensorRT wheels to another folder
|
# Add TensorRT wheels to another folder
|
||||||
COPY requirements-tensorrt.txt /requirements-tensorrt.txt
|
COPY requirements-tensorrt.txt /requirements-tensorrt.txt
|
||||||
RUN mkdir -p /trt-wheels && pip3 wheel --wheel-dir=/trt-wheels -r requirements-tensorrt.txt
|
RUN mkdir -p /trt-wheels && pip3 wheel --wheel-dir=/trt-wheels -r requirements-tensorrt.txt
|
||||||
@ -190,22 +190,10 @@ RUN ldconfig
|
|||||||
EXPOSE 5000
|
EXPOSE 5000
|
||||||
EXPOSE 1935
|
EXPOSE 1935
|
||||||
EXPOSE 8554
|
EXPOSE 8554
|
||||||
EXPOSE 8555
|
EXPOSE 8555/tcp 8555/udp
|
||||||
|
|
||||||
# Fails if cont-init.d fails
|
|
||||||
ENV S6_BEHAVIOUR_IF_STAGE2_FAILS=2
|
|
||||||
# Wait indefinitely for cont-init.d to finish before starting services
|
|
||||||
ENV S6_CMD_WAIT_FOR_SERVICES=1
|
|
||||||
ENV S6_CMD_WAIT_FOR_SERVICES_MAXTIME=0
|
|
||||||
# Give services (including Frigate) 30 seconds to stop before killing them
|
|
||||||
# But this is not working currently because of:
|
|
||||||
# https://github.com/just-containers/s6-overlay/issues/503
|
|
||||||
ENV S6_SERVICES_GRACETIME=30000
|
|
||||||
# Configure logging to prepend timestamps, log to stdout, keep 0 archives and rotate on 10MB
|
# Configure logging to prepend timestamps, log to stdout, keep 0 archives and rotate on 10MB
|
||||||
ENV S6_LOGGING_SCRIPT="T 1 n0 s10000000 T"
|
ENV S6_LOGGING_SCRIPT="T 1 n0 s10000000 T"
|
||||||
# TODO: remove after a new version of s6-overlay is released. See:
|
|
||||||
# https://github.com/just-containers/s6-overlay/issues/460#issuecomment-1327127006
|
|
||||||
ENV S6_SERVICES_READYTIME=50
|
|
||||||
|
|
||||||
ENTRYPOINT ["/init"]
|
ENTRYPOINT ["/init"]
|
||||||
CMD []
|
CMD []
|
||||||
@ -215,7 +203,11 @@ FROM deps AS devcontainer
|
|||||||
|
|
||||||
# Do not start the actual Frigate service on devcontainer as it will be started by VSCode
|
# Do not start the actual Frigate service on devcontainer as it will be started by VSCode
|
||||||
# But start a fake service for simulating the logs
|
# But start a fake service for simulating the logs
|
||||||
COPY docker/fake_frigate_run /etc/services.d/frigate/run
|
COPY docker/fake_frigate_run /etc/s6-overlay/s6-rc.d/frigate/run
|
||||||
|
|
||||||
|
# Create symbolic link to the frigate source code, as go2rtc's create_config.sh uses it
|
||||||
|
RUN mkdir -p /opt/frigate \
|
||||||
|
&& ln -svf /workspace/frigate/frigate /opt/frigate/frigate
|
||||||
|
|
||||||
# Install Node 16
|
# Install Node 16
|
||||||
RUN apt-get update \
|
RUN apt-get update \
|
||||||
@ -238,8 +230,8 @@ CMD ["sleep", "infinity"]
|
|||||||
|
|
||||||
|
|
||||||
# Frigate web build
|
# Frigate web build
|
||||||
# force this to run on amd64 because QEMU is painfully slow
|
# This should be architecture agnostic, so speed up the build on multiarch by not using QEMU.
|
||||||
FROM --platform=linux/amd64 node:16 AS web-build
|
FROM --platform=$BUILDPLATFORM node:16 AS web-build
|
||||||
|
|
||||||
WORKDIR /work
|
WORKDIR /work
|
||||||
COPY web/package.json web/package-lock.json ./
|
COPY web/package.json web/package-lock.json ./
|
||||||
@ -266,11 +258,13 @@ COPY --from=rootfs / /
|
|||||||
|
|
||||||
# Frigate w/ TensorRT Support as separate image
|
# Frigate w/ TensorRT Support as separate image
|
||||||
FROM frigate AS frigate-tensorrt
|
FROM frigate AS frigate-tensorrt
|
||||||
RUN --mount=type=bind,from=wheels,source=/trt-wheels,target=/deps/trt-wheels \
|
RUN --mount=type=bind,from=trt-wheels,source=/trt-wheels,target=/deps/trt-wheels \
|
||||||
pip3 install -U /deps/trt-wheels/*.whl
|
pip3 install -U /deps/trt-wheels/*.whl && \
|
||||||
|
ln -s libnvrtc.so.11.2 /usr/local/lib/python3.9/dist-packages/nvidia/cuda_nvrtc/lib/libnvrtc.so && \
|
||||||
|
ldconfig
|
||||||
|
|
||||||
# Dev Container w/ TRT
|
# Dev Container w/ TRT
|
||||||
FROM devcontainer AS devcontainer-trt
|
FROM devcontainer AS devcontainer-trt
|
||||||
|
|
||||||
RUN --mount=type=bind,from=wheels,source=/trt-wheels,target=/deps/trt-wheels \
|
RUN --mount=type=bind,from=trt-wheels,source=/trt-wheels,target=/deps/trt-wheels \
|
||||||
pip3 install -U /deps/trt-wheels/*.whl
|
pip3 install -U /deps/trt-wheels/*.whl
|
||||||
|
|||||||
13
Makefile
13
Makefile
@ -1,7 +1,7 @@
|
|||||||
default_target: local
|
default_target: local
|
||||||
|
|
||||||
COMMIT_HASH := $(shell git log -1 --pretty=format:"%h"|tail -1)
|
COMMIT_HASH := $(shell git log -1 --pretty=format:"%h"|tail -1)
|
||||||
VERSION = 0.12.0
|
VERSION = 0.13.0
|
||||||
IMAGE_REPO ?= ghcr.io/blakeblackshear/frigate
|
IMAGE_REPO ?= ghcr.io/blakeblackshear/frigate
|
||||||
CURRENT_UID := $(shell id -u)
|
CURRENT_UID := $(shell id -u)
|
||||||
CURRENT_GID := $(shell id -g)
|
CURRENT_GID := $(shell id -g)
|
||||||
@ -22,18 +22,15 @@ amd64:
|
|||||||
arm64:
|
arm64:
|
||||||
docker buildx build --platform linux/arm64 --target=frigate --tag $(IMAGE_REPO):$(VERSION)-$(COMMIT_HASH) .
|
docker buildx build --platform linux/arm64 --target=frigate --tag $(IMAGE_REPO):$(VERSION)-$(COMMIT_HASH) .
|
||||||
|
|
||||||
armv7:
|
build: version amd64 arm64
|
||||||
docker buildx build --platform linux/arm/v7 --target=frigate --tag $(IMAGE_REPO):$(VERSION)-$(COMMIT_HASH) .
|
docker buildx build --platform linux/arm64/v8,linux/amd64 --target=frigate --tag $(IMAGE_REPO):$(VERSION)-$(COMMIT_HASH) .
|
||||||
|
|
||||||
build: version amd64 arm64 armv7
|
|
||||||
docker buildx build --platform linux/arm/v7,linux/arm64/v8,linux/amd64 --target=frigate --tag $(IMAGE_REPO):$(VERSION)-$(COMMIT_HASH) .
|
|
||||||
|
|
||||||
push: build
|
push: build
|
||||||
docker buildx build --push --platform linux/arm/v7,linux/arm64/v8,linux/amd64 --target=frigate --tag $(IMAGE_REPO):${GITHUB_REF_NAME}-$(COMMIT_HASH) .
|
docker buildx build --push --platform linux/arm64/v8,linux/amd64 --target=frigate --tag $(IMAGE_REPO):${GITHUB_REF_NAME}-$(COMMIT_HASH) .
|
||||||
docker buildx build --push --platform linux/amd64 --target=frigate-tensorrt --tag $(IMAGE_REPO):${GITHUB_REF_NAME}-$(COMMIT_HASH)-tensorrt .
|
docker buildx build --push --platform linux/amd64 --target=frigate-tensorrt --tag $(IMAGE_REPO):${GITHUB_REF_NAME}-$(COMMIT_HASH)-tensorrt .
|
||||||
|
|
||||||
run: local
|
run: local
|
||||||
docker run --rm --publish=5000:5000 --volume=${PWD}/config/config.yml:/config/config.yml frigate:latest
|
docker run --rm --publish=5000:5000 --volume=${PWD}/config:/config frigate:latest
|
||||||
|
|
||||||
run_tests: local
|
run_tests: local
|
||||||
docker run --rm --workdir=/opt/frigate --entrypoint= frigate:latest python3 -u -m unittest
|
docker run --rm --workdir=/opt/frigate --entrypoint= frigate:latest python3 -u -m unittest
|
||||||
|
|||||||
@ -16,7 +16,8 @@ Use of a [Google Coral Accelerator](https://coral.ai/products/) is optional, but
|
|||||||
- Communicates over MQTT for easy integration into other systems
|
- Communicates over MQTT for easy integration into other systems
|
||||||
- Records video with retention settings based on detected objects
|
- Records video with retention settings based on detected objects
|
||||||
- 24/7 recording
|
- 24/7 recording
|
||||||
- Re-streaming via RTMP to reduce the number of connections to your camera
|
- Re-streaming via RTSP to reduce the number of connections to your camera
|
||||||
|
- WebRTC & MSE support for low-latency live view
|
||||||
|
|
||||||
## Documentation
|
## Documentation
|
||||||
|
|
||||||
|
|||||||
12
benchmark.py
12
benchmark.py
@ -1,11 +1,11 @@
|
|||||||
import os
|
|
||||||
from statistics import mean
|
|
||||||
import multiprocessing as mp
|
|
||||||
import numpy as np
|
|
||||||
import datetime
|
import datetime
|
||||||
|
import multiprocessing as mp
|
||||||
|
from statistics import mean
|
||||||
|
|
||||||
|
import numpy as np
|
||||||
|
|
||||||
from frigate.config import DetectorTypeEnum
|
from frigate.config import DetectorTypeEnum
|
||||||
from frigate.object_detection import (
|
from frigate.object_detection import (
|
||||||
LocalObjectDetector,
|
|
||||||
ObjectDetectProcess,
|
ObjectDetectProcess,
|
||||||
RemoteObjectDetector,
|
RemoteObjectDetector,
|
||||||
load_labels,
|
load_labels,
|
||||||
@ -53,7 +53,7 @@ def start(id, num_detections, detection_queue, event):
|
|||||||
frame_times = []
|
frame_times = []
|
||||||
for x in range(0, num_detections):
|
for x in range(0, num_detections):
|
||||||
start_frame = datetime.datetime.now().timestamp()
|
start_frame = datetime.datetime.now().timestamp()
|
||||||
detections = object_detector.detect(my_frame)
|
object_detector.detect(my_frame)
|
||||||
frame_times.append(datetime.datetime.now().timestamp() - start_frame)
|
frame_times.append(datetime.datetime.now().timestamp() - start_frame)
|
||||||
|
|
||||||
duration = datetime.datetime.now().timestamp() - start
|
duration = datetime.datetime.now().timestamp() - start
|
||||||
|
|||||||
103
benchmark_motion.py
Normal file
103
benchmark_motion.py
Normal file
@ -0,0 +1,103 @@
|
|||||||
|
import datetime
|
||||||
|
import multiprocessing as mp
|
||||||
|
import os
|
||||||
|
from statistics import mean
|
||||||
|
|
||||||
|
import cv2
|
||||||
|
import numpy as np
|
||||||
|
|
||||||
|
from frigate.config import MotionConfig
|
||||||
|
from frigate.motion.frigate_motion import FrigateMotionDetector
|
||||||
|
from frigate.motion.improved_motion import ImprovedMotionDetector
|
||||||
|
|
||||||
|
# get info on the video
|
||||||
|
# cap = cv2.VideoCapture("debug/front_cam_2023_05_23_08_41__2023_05_23_08_43.mp4")
|
||||||
|
# cap = cv2.VideoCapture("debug/motion_test_clips/rain_1.mp4")
|
||||||
|
cap = cv2.VideoCapture("debug/motion_test_clips/ir_off.mp4")
|
||||||
|
# cap = cv2.VideoCapture("airport.mp4")
|
||||||
|
width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
|
||||||
|
height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
|
||||||
|
fps = cap.get(cv2.CAP_PROP_FPS)
|
||||||
|
frame_shape = (height, width, 3)
|
||||||
|
|
||||||
|
# create the motion config
|
||||||
|
motion_config = MotionConfig()
|
||||||
|
motion_config.mask = np.zeros((height, width), np.uint8)
|
||||||
|
motion_config.mask[:] = 255
|
||||||
|
motion_config.improve_contrast = 1
|
||||||
|
motion_config.frame_alpha = 0.02
|
||||||
|
motion_config.threshold = 40
|
||||||
|
motion_config.contour_area = 15
|
||||||
|
save_images = True
|
||||||
|
|
||||||
|
# create motion detectors
|
||||||
|
frigate_motion_detector = FrigateMotionDetector(
|
||||||
|
frame_shape=frame_shape,
|
||||||
|
config=motion_config,
|
||||||
|
fps=fps,
|
||||||
|
improve_contrast=mp.Value("i", motion_config.improve_contrast),
|
||||||
|
threshold=mp.Value("i", motion_config.threshold),
|
||||||
|
contour_area=mp.Value("i", motion_config.contour_area),
|
||||||
|
)
|
||||||
|
frigate_motion_detector.save_images = save_images
|
||||||
|
|
||||||
|
improved_motion_detector = ImprovedMotionDetector(
|
||||||
|
frame_shape=frame_shape,
|
||||||
|
config=motion_config,
|
||||||
|
fps=fps,
|
||||||
|
improve_contrast=mp.Value("i", motion_config.improve_contrast),
|
||||||
|
threshold=mp.Value("i", motion_config.threshold),
|
||||||
|
contour_area=mp.Value("i", motion_config.contour_area),
|
||||||
|
)
|
||||||
|
improved_motion_detector.save_images = save_images
|
||||||
|
|
||||||
|
# read and process frames
|
||||||
|
frame_times = {"frigate": [], "improved": []}
|
||||||
|
ret, frame = cap.read()
|
||||||
|
frame_counter = 1
|
||||||
|
while ret:
|
||||||
|
yuv_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2YUV_I420)
|
||||||
|
|
||||||
|
start_frame = datetime.datetime.now().timestamp()
|
||||||
|
frigate_motion_detector.detect(yuv_frame)
|
||||||
|
frame_times["frigate"].append(datetime.datetime.now().timestamp() - start_frame)
|
||||||
|
|
||||||
|
start_frame = datetime.datetime.now().timestamp()
|
||||||
|
improved_motion_detector.detect(yuv_frame)
|
||||||
|
frame_times["improved"].append(datetime.datetime.now().timestamp() - start_frame)
|
||||||
|
|
||||||
|
frigate_frame = f"debug/frames/frigate-{frame_counter}.jpg"
|
||||||
|
improved_frame = f"debug/frames/improved-{frame_counter}.jpg"
|
||||||
|
if os.path.exists(frigate_frame) and os.path.exists(improved_frame):
|
||||||
|
image_row_1 = cv2.hconcat(
|
||||||
|
[
|
||||||
|
cv2.imread(frigate_frame),
|
||||||
|
cv2.imread(improved_frame),
|
||||||
|
]
|
||||||
|
)
|
||||||
|
|
||||||
|
image_row_2 = cv2.resize(
|
||||||
|
frame,
|
||||||
|
dsize=(
|
||||||
|
frigate_motion_detector.motion_frame_size[1] * 2,
|
||||||
|
frigate_motion_detector.motion_frame_size[0] * 2,
|
||||||
|
),
|
||||||
|
interpolation=cv2.INTER_LINEAR,
|
||||||
|
)
|
||||||
|
|
||||||
|
cv2.imwrite(
|
||||||
|
f"debug/frames/all-{frame_counter}.jpg",
|
||||||
|
cv2.vconcat([image_row_1, image_row_2]),
|
||||||
|
)
|
||||||
|
os.unlink(frigate_frame)
|
||||||
|
os.unlink(improved_frame)
|
||||||
|
frame_counter += 1
|
||||||
|
|
||||||
|
ret, frame = cap.read()
|
||||||
|
|
||||||
|
cap.release()
|
||||||
|
|
||||||
|
print("Frigate Motion Detector")
|
||||||
|
print(f"Average frame processing time: {mean(frame_times['frigate'])*1000:.2f}ms")
|
||||||
|
print("Improved Motion Detector")
|
||||||
|
print(f"Average frame processing time: {mean(frame_times['improved'])*1000:.2f}ms")
|
||||||
@ -27,7 +27,7 @@ services:
|
|||||||
- .:/workspace/frigate:cached
|
- .:/workspace/frigate:cached
|
||||||
- ./web/dist:/opt/frigate/web:cached
|
- ./web/dist:/opt/frigate/web:cached
|
||||||
- /etc/localtime:/etc/localtime:ro
|
- /etc/localtime:/etc/localtime:ro
|
||||||
- ./config/config.yml:/config/config.yml:ro
|
- ./config:/config
|
||||||
- ./debug:/media/frigate
|
- ./debug:/media/frigate
|
||||||
# Create the trt-models folder using the documented method of generating TRT models
|
# Create the trt-models folder using the documented method of generating TRT models
|
||||||
# - ./debug/trt-models:/trt-models
|
# - ./debug/trt-models:/trt-models
|
||||||
|
|||||||
@ -25,6 +25,22 @@ tar -zxf ${VOD_MODULE_VERSION}.tar.gz -C /tmp/nginx-vod-module --strip-component
|
|||||||
rm ${VOD_MODULE_VERSION}.tar.gz
|
rm ${VOD_MODULE_VERSION}.tar.gz
|
||||||
# Patch MAX_CLIPS to allow more clips to be added than the default 128
|
# Patch MAX_CLIPS to allow more clips to be added than the default 128
|
||||||
sed -i 's/MAX_CLIPS (128)/MAX_CLIPS (1080)/g' /tmp/nginx-vod-module/vod/media_set.h
|
sed -i 's/MAX_CLIPS (128)/MAX_CLIPS (1080)/g' /tmp/nginx-vod-module/vod/media_set.h
|
||||||
|
patch -d /tmp/nginx-vod-module/ -p1 << 'EOF'
|
||||||
|
--- a/vod/avc_hevc_parser.c 2022-06-27 11:38:10.000000000 +0000
|
||||||
|
+++ b/vod/avc_hevc_parser.c 2023-01-16 11:25:10.900521298 +0000
|
||||||
|
@@ -3,6 +3,9 @@
|
||||||
|
bool_t
|
||||||
|
avc_hevc_parser_rbsp_trailing_bits(bit_reader_state_t* reader)
|
||||||
|
{
|
||||||
|
+ // https://github.com/blakeblackshear/frigate/issues/4572
|
||||||
|
+ return TRUE;
|
||||||
|
+
|
||||||
|
uint32_t one_bit;
|
||||||
|
|
||||||
|
if (reader->stream.eof_reached)
|
||||||
|
EOF
|
||||||
|
|
||||||
|
|
||||||
mkdir /tmp/nginx-secure-token-module
|
mkdir /tmp/nginx-secure-token-module
|
||||||
wget https://github.com/kaltura/nginx-secure-token-module/archive/refs/tags/${SECURE_TOKEN_MODULE_VERSION}.tar.gz
|
wget https://github.com/kaltura/nginx-secure-token-module/archive/refs/tags/${SECURE_TOKEN_MODULE_VERSION}.tar.gz
|
||||||
tar -zxf ${SECURE_TOKEN_MODULE_VERSION}.tar.gz -C /tmp/nginx-secure-token-module --strip-components=1
|
tar -zxf ${SECURE_TOKEN_MODULE_VERSION}.tar.gz -C /tmp/nginx-secure-token-module --strip-components=1
|
||||||
|
|||||||
@ -2,7 +2,12 @@
|
|||||||
# shellcheck shell=bash
|
# shellcheck shell=bash
|
||||||
# Start the fake Frigate service
|
# Start the fake Frigate service
|
||||||
|
|
||||||
|
set -o errexit -o nounset -o pipefail
|
||||||
|
|
||||||
|
# Tell S6-Overlay not to restart this service
|
||||||
|
s6-svc -O .
|
||||||
|
|
||||||
while true; do
|
while true; do
|
||||||
echo "The fake Frigate service is running..."
|
echo "[INFO] The fake Frigate service is running..."
|
||||||
sleep 5s
|
sleep 5s
|
||||||
done
|
done
|
||||||
|
|||||||
@ -10,16 +10,17 @@ apt-get -qq install --no-install-recommends -y \
|
|||||||
wget \
|
wget \
|
||||||
procps vainfo \
|
procps vainfo \
|
||||||
unzip locales tzdata libxml2 xz-utils \
|
unzip locales tzdata libxml2 xz-utils \
|
||||||
python3-pip
|
python3-pip \
|
||||||
|
curl \
|
||||||
|
jq \
|
||||||
|
nethogs
|
||||||
|
|
||||||
# add raspberry pi repo
|
|
||||||
mkdir -p -m 600 /root/.gnupg
|
mkdir -p -m 600 /root/.gnupg
|
||||||
gpg --no-default-keyring --keyring /usr/share/keyrings/raspbian.gpg --keyserver keyserver.ubuntu.com --recv-keys 9165938D90FDDD2E
|
|
||||||
echo "deb [signed-by=/usr/share/keyrings/raspbian.gpg] http://raspbian.raspberrypi.org/raspbian/ bullseye main contrib non-free rpi" | tee /etc/apt/sources.list.d/raspi.list
|
|
||||||
|
|
||||||
# add coral repo
|
# add coral repo
|
||||||
wget --quiet -O /usr/share/keyrings/google-edgetpu.gpg https://packages.cloud.google.com/apt/doc/apt-key.gpg
|
curl -fsSLo - https://packages.cloud.google.com/apt/doc/apt-key.gpg | \
|
||||||
echo "deb [signed-by=/usr/share/keyrings/google-edgetpu.gpg] https://packages.cloud.google.com/apt coral-edgetpu-stable main" | tee /etc/apt/sources.list.d/coral-edgetpu.list
|
gpg --dearmor -o /etc/apt/trusted.gpg.d/google-cloud-packages-archive-keyring.gpg
|
||||||
|
echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | tee /etc/apt/sources.list.d/coral-edgetpu.list
|
||||||
echo "libedgetpu1-max libedgetpu/accepted-eula select true" | debconf-set-selections
|
echo "libedgetpu1-max libedgetpu/accepted-eula select true" | debconf-set-selections
|
||||||
|
|
||||||
# enable non-free repo
|
# enable non-free repo
|
||||||
@ -30,21 +31,20 @@ apt-get -qq update
|
|||||||
apt-get -qq install --no-install-recommends --no-install-suggests -y \
|
apt-get -qq install --no-install-recommends --no-install-suggests -y \
|
||||||
libedgetpu1-max python3-tflite-runtime python3-pycoral
|
libedgetpu1-max python3-tflite-runtime python3-pycoral
|
||||||
|
|
||||||
# btbn-ffmpeg -> amd64 / arm64
|
# btbn-ffmpeg -> amd64
|
||||||
if [[ "${TARGETARCH}" == "amd64" || "${TARGETARCH}" == "arm64" ]]; then
|
if [[ "${TARGETARCH}" == "amd64" ]]; then
|
||||||
if [[ "${TARGETARCH}" == "amd64" ]]; then
|
|
||||||
btbn_arch="64"
|
|
||||||
else
|
|
||||||
btbn_arch="arm64"
|
|
||||||
fi
|
|
||||||
mkdir -p /usr/lib/btbn-ffmpeg
|
mkdir -p /usr/lib/btbn-ffmpeg
|
||||||
wget -qO btbn-ffmpeg.tar.xz "https://github.com/BtbN/FFmpeg-Builds/releases/download/autobuild-2022-07-31-12-37/ffmpeg-n5.1-2-g915ef932a3-linux${btbn_arch}-gpl-5.1.tar.xz"
|
wget -qO btbn-ffmpeg.tar.xz "https://github.com/BtbN/FFmpeg-Builds/releases/download/autobuild-2022-07-31-12-37/ffmpeg-n5.1-2-g915ef932a3-linux64-gpl-5.1.tar.xz"
|
||||||
tar -xf btbn-ffmpeg.tar.xz -C /usr/lib/btbn-ffmpeg --strip-components 1
|
tar -xf btbn-ffmpeg.tar.xz -C /usr/lib/btbn-ffmpeg --strip-components 1
|
||||||
rm -rf btbn-ffmpeg.tar.xz /usr/lib/btbn-ffmpeg/doc /usr/lib/btbn-ffmpeg/bin/ffplay
|
rm -rf btbn-ffmpeg.tar.xz /usr/lib/btbn-ffmpeg/doc /usr/lib/btbn-ffmpeg/bin/ffplay
|
||||||
fi
|
fi
|
||||||
|
|
||||||
# ffmpeg -> arm32
|
# ffmpeg -> arm64
|
||||||
if [[ "${TARGETARCH}" == "arm" ]]; then
|
if [[ "${TARGETARCH}" == "arm64" ]]; then
|
||||||
|
# add raspberry pi repo
|
||||||
|
gpg --no-default-keyring --keyring /usr/share/keyrings/raspbian.gpg --keyserver keyserver.ubuntu.com --recv-keys 82B129927FA3303E
|
||||||
|
echo "deb [signed-by=/usr/share/keyrings/raspbian.gpg] https://archive.raspberrypi.org/debian/ bullseye main" | tee /etc/apt/sources.list.d/raspi.list
|
||||||
|
apt-get -qq update
|
||||||
apt-get -qq install --no-install-recommends --no-install-suggests -y ffmpeg
|
apt-get -qq install --no-install-recommends --no-install-suggests -y ffmpeg
|
||||||
fi
|
fi
|
||||||
|
|
||||||
@ -57,6 +57,9 @@ if [[ "${TARGETARCH}" == "amd64" ]]; then
|
|||||||
apt-get -qq install --no-install-recommends --no-install-suggests -y \
|
apt-get -qq install --no-install-recommends --no-install-suggests -y \
|
||||||
intel-opencl-icd \
|
intel-opencl-icd \
|
||||||
mesa-va-drivers libva-drm2 intel-media-va-driver-non-free i965-va-driver libmfx1 radeontop intel-gpu-tools
|
mesa-va-drivers libva-drm2 intel-media-va-driver-non-free i965-va-driver libmfx1 radeontop intel-gpu-tools
|
||||||
|
# something about this dependency requires it to be installed in a separate call rather than in the line above
|
||||||
|
apt-get -qq install --no-install-recommends --no-install-suggests -y \
|
||||||
|
i965-va-driver-shaders
|
||||||
rm -f /etc/apt/sources.list.d/debian-testing.list
|
rm -f /etc/apt/sources.list.d/debian-testing.list
|
||||||
fi
|
fi
|
||||||
|
|
||||||
@ -65,17 +68,13 @@ if [[ "${TARGETARCH}" == "arm64" ]]; then
|
|||||||
libva-drm2 mesa-va-drivers
|
libva-drm2 mesa-va-drivers
|
||||||
fi
|
fi
|
||||||
|
|
||||||
# not sure why 32bit arm requires all these
|
|
||||||
if [[ "${TARGETARCH}" == "arm" ]]; then
|
|
||||||
apt-get -qq install --no-install-recommends --no-install-suggests -y \
|
|
||||||
libgtk-3-dev \
|
|
||||||
libavcodec-dev libavformat-dev libswscale-dev libv4l-dev \
|
|
||||||
libxvidcore-dev libx264-dev libjpeg-dev libpng-dev libtiff-dev \
|
|
||||||
gfortran openexr libatlas-base-dev libtbb-dev libdc1394-22-dev libopenexr-dev \
|
|
||||||
libgstreamer-plugins-base1.0-dev libgstreamer1.0-dev
|
|
||||||
fi
|
|
||||||
|
|
||||||
apt-get purge gnupg apt-transport-https wget xz-utils -y
|
apt-get purge gnupg apt-transport-https wget xz-utils -y
|
||||||
apt-get clean autoclean -y
|
apt-get clean autoclean -y
|
||||||
apt-get autoremove --purge -y
|
apt-get autoremove --purge -y
|
||||||
rm -rf /var/lib/apt/lists/*
|
rm -rf /var/lib/apt/lists/*
|
||||||
|
|
||||||
|
# Install yq, for frigate-prepare and go2rtc echo source
|
||||||
|
curl -fsSL \
|
||||||
|
"https://github.com/mikefarah/yq/releases/download/v4.33.3/yq_linux_$(dpkg --print-architecture)" \
|
||||||
|
--output /usr/local/bin/yq
|
||||||
|
chmod +x /usr/local/bin/yq
|
||||||
|
|||||||
@ -2,12 +2,10 @@
|
|||||||
|
|
||||||
set -euxo pipefail
|
set -euxo pipefail
|
||||||
|
|
||||||
s6_version="3.1.2.1"
|
s6_version="3.1.4.1"
|
||||||
|
|
||||||
if [[ "${TARGETARCH}" == "amd64" ]]; then
|
if [[ "${TARGETARCH}" == "amd64" ]]; then
|
||||||
s6_arch="x86_64"
|
s6_arch="x86_64"
|
||||||
elif [[ "${TARGETARCH}" == "arm" ]]; then
|
|
||||||
s6_arch="armhf"
|
|
||||||
elif [[ "${TARGETARCH}" == "arm64" ]]; then
|
elif [[ "${TARGETARCH}" == "arm64" ]]; then
|
||||||
s6_arch="aarch64"
|
s6_arch="aarch64"
|
||||||
fi
|
fi
|
||||||
|
|||||||
5
docker/rootfs/etc/ld.so.conf.d/cuda_tensorrt.conf
Normal file
5
docker/rootfs/etc/ld.so.conf.d/cuda_tensorrt.conf
Normal file
@ -0,0 +1,5 @@
|
|||||||
|
/usr/local/lib/python3.9/dist-packages/nvidia/cudnn/lib
|
||||||
|
/usr/local/lib/python3.9/dist-packages/nvidia/cuda_runtime/lib
|
||||||
|
/usr/local/lib/python3.9/dist-packages/nvidia/cublas/lib
|
||||||
|
/usr/local/lib/python3.9/dist-packages/nvidia/cuda_nvrtc/lib
|
||||||
|
/usr/local/lib/python3.9/dist-packages/tensorrt
|
||||||
@ -0,0 +1 @@
|
|||||||
|
frigate
|
||||||
@ -0,0 +1 @@
|
|||||||
|
frigate-pipeline
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/frigate-log/type
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/frigate-log/type
Normal file
@ -0,0 +1 @@
|
|||||||
|
longrun
|
||||||
28
docker/rootfs/etc/s6-overlay/s6-rc.d/frigate/finish
Executable file
28
docker/rootfs/etc/s6-overlay/s6-rc.d/frigate/finish
Executable file
@ -0,0 +1,28 @@
|
|||||||
|
#!/command/with-contenv bash
|
||||||
|
# shellcheck shell=bash
|
||||||
|
# Take down the S6 supervision tree when the service exits
|
||||||
|
|
||||||
|
set -o errexit -o nounset -o pipefail
|
||||||
|
|
||||||
|
# Logs should be sent to stdout so that s6 can collect them
|
||||||
|
|
||||||
|
declare exit_code_container
|
||||||
|
exit_code_container=$(cat /run/s6-linux-init-container-results/exitcode)
|
||||||
|
readonly exit_code_container
|
||||||
|
readonly exit_code_service="${1}"
|
||||||
|
readonly exit_code_signal="${2}"
|
||||||
|
readonly service="Frigate"
|
||||||
|
|
||||||
|
echo "[INFO] Service ${service} exited with code ${exit_code_service} (by signal ${exit_code_signal})"
|
||||||
|
|
||||||
|
if [[ "${exit_code_service}" -eq 256 ]]; then
|
||||||
|
if [[ "${exit_code_container}" -eq 0 ]]; then
|
||||||
|
echo $((128 + exit_code_signal)) >/run/s6-linux-init-container-results/exitcode
|
||||||
|
fi
|
||||||
|
elif [[ "${exit_code_service}" -ne 0 ]]; then
|
||||||
|
if [[ "${exit_code_container}" -eq 0 ]]; then
|
||||||
|
echo "${exit_code_service}" >/run/s6-linux-init-container-results/exitcode
|
||||||
|
fi
|
||||||
|
fi
|
||||||
|
|
||||||
|
exec /run/s6/basedir/bin/halt
|
||||||
@ -0,0 +1 @@
|
|||||||
|
frigate-log
|
||||||
54
docker/rootfs/etc/s6-overlay/s6-rc.d/frigate/run
Executable file
54
docker/rootfs/etc/s6-overlay/s6-rc.d/frigate/run
Executable file
@ -0,0 +1,54 @@
|
|||||||
|
#!/command/with-contenv bash
|
||||||
|
# shellcheck shell=bash
|
||||||
|
# Start the Frigate service
|
||||||
|
|
||||||
|
set -o errexit -o nounset -o pipefail
|
||||||
|
|
||||||
|
# Logs should be sent to stdout so that s6 can collect them
|
||||||
|
|
||||||
|
# Tell S6-Overlay not to restart this service
|
||||||
|
s6-svc -O .
|
||||||
|
|
||||||
|
function migrate_db_path() {
|
||||||
|
# Find config file in yaml or yml, but prefer yaml
|
||||||
|
local config_file="${CONFIG_FILE:-"/config/config.yml"}"
|
||||||
|
local config_file_yaml="${config_file//.yml/.yaml}"
|
||||||
|
if [[ -f "${config_file_yaml}" ]]; then
|
||||||
|
config_file="${config_file_yaml}"
|
||||||
|
elif [[ ! -f "${config_file}" ]]; then
|
||||||
|
echo "[ERROR] Frigate config file not found"
|
||||||
|
return 1
|
||||||
|
fi
|
||||||
|
unset config_file_yaml
|
||||||
|
|
||||||
|
# Use yq to check if database.path is set
|
||||||
|
local user_db_path
|
||||||
|
user_db_path=$(yq eval '.database.path' "${config_file}")
|
||||||
|
|
||||||
|
if [[ "${user_db_path}" == "null" ]]; then
|
||||||
|
local previous_db_path="/media/frigate/frigate.db"
|
||||||
|
local new_db_dir="/config"
|
||||||
|
if [[ -f "${previous_db_path}" ]]; then
|
||||||
|
if mountpoint --quiet "${new_db_dir}"; then
|
||||||
|
# /config is a mount point, move the db
|
||||||
|
echo "[INFO] Moving db from '${previous_db_path}' to the '${new_db_dir}' dir..."
|
||||||
|
# Move all files that starts with frigate.db to the new directory
|
||||||
|
mv -vf "${previous_db_path}"* "${new_db_dir}"
|
||||||
|
else
|
||||||
|
echo "[ERROR] Trying to migrate the db path from '${previous_db_path}' to the '${new_db_dir}' dir, but '${new_db_dir}' is not a mountpoint, please mount the '${new_db_dir}' dir"
|
||||||
|
return 1
|
||||||
|
fi
|
||||||
|
fi
|
||||||
|
fi
|
||||||
|
}
|
||||||
|
|
||||||
|
echo "[INFO] Preparing Frigate..."
|
||||||
|
migrate_db_path
|
||||||
|
|
||||||
|
echo "[INFO] Starting Frigate..."
|
||||||
|
|
||||||
|
cd /opt/frigate || echo "[ERROR] Failed to change working directory to /opt/frigate"
|
||||||
|
|
||||||
|
# Replace the bash process with the Frigate process, redirecting stderr to stdout
|
||||||
|
exec 2>&1
|
||||||
|
exec python3 -u -m frigate
|
||||||
@ -0,0 +1 @@
|
|||||||
|
120000
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/frigate/type
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/frigate/type
Normal file
@ -0,0 +1 @@
|
|||||||
|
longrun
|
||||||
12
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc-healthcheck/finish
Executable file
12
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc-healthcheck/finish
Executable file
@ -0,0 +1,12 @@
|
|||||||
|
#!/command/with-contenv bash
|
||||||
|
# shellcheck shell=bash
|
||||||
|
|
||||||
|
set -o errexit -o nounset -o pipefail
|
||||||
|
|
||||||
|
# Logs should be sent to stdout so that s6 can collect them
|
||||||
|
|
||||||
|
readonly exit_code_service="${1}"
|
||||||
|
readonly exit_code_signal="${2}"
|
||||||
|
readonly service="go2rtc-healthcheck"
|
||||||
|
|
||||||
|
echo "[INFO] The ${service} service exited with code ${exit_code_service} (by signal ${exit_code_signal})"
|
||||||
@ -0,0 +1 @@
|
|||||||
|
go2rtc-log
|
||||||
22
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc-healthcheck/run
Executable file
22
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc-healthcheck/run
Executable file
@ -0,0 +1,22 @@
|
|||||||
|
#!/command/with-contenv bash
|
||||||
|
# shellcheck shell=bash
|
||||||
|
# Start the go2rtc-healthcheck service
|
||||||
|
|
||||||
|
set -o errexit -o nounset -o pipefail
|
||||||
|
|
||||||
|
# Logs should be sent to stdout so that s6 can collect them
|
||||||
|
|
||||||
|
# Give some additional time for go2rtc to start before start pinging
|
||||||
|
sleep 10s
|
||||||
|
echo "[INFO] Starting go2rtc healthcheck service..."
|
||||||
|
|
||||||
|
while sleep 30s; do
|
||||||
|
# Check if the service is running
|
||||||
|
if ! curl --connect-timeout 10 --fail --silent --show-error --output /dev/null http://127.0.0.1:1984/api/streams 2>&1; then
|
||||||
|
echo "[ERROR] The go2rtc service is not responding to ping, restarting..."
|
||||||
|
# We can also use -r instead of -t to send kill signal rather than term
|
||||||
|
s6-svc -t /var/run/service/go2rtc 2>&1
|
||||||
|
# Give some additional time to go2rtc to restart before start pinging again
|
||||||
|
sleep 10s
|
||||||
|
fi
|
||||||
|
done
|
||||||
@ -0,0 +1 @@
|
|||||||
|
5000
|
||||||
@ -0,0 +1 @@
|
|||||||
|
longrun
|
||||||
@ -0,0 +1,2 @@
|
|||||||
|
go2rtc
|
||||||
|
go2rtc-healthcheck
|
||||||
@ -0,0 +1 @@
|
|||||||
|
go2rtc-pipeline
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc-log/type
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc-log/type
Normal file
@ -0,0 +1 @@
|
|||||||
|
longrun
|
||||||
12
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc/finish
Executable file
12
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc/finish
Executable file
@ -0,0 +1,12 @@
|
|||||||
|
#!/command/with-contenv bash
|
||||||
|
# shellcheck shell=bash
|
||||||
|
|
||||||
|
set -o errexit -o nounset -o pipefail
|
||||||
|
|
||||||
|
# Logs should be sent to stdout so that s6 can collect them
|
||||||
|
|
||||||
|
readonly exit_code_service="${1}"
|
||||||
|
readonly exit_code_signal="${2}"
|
||||||
|
readonly service="go2rtc"
|
||||||
|
|
||||||
|
echo "[INFO] The ${service} service exited with code ${exit_code_service} (by signal ${exit_code_signal})"
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc/producer-for
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc/producer-for
Normal file
@ -0,0 +1 @@
|
|||||||
|
go2rtc-log
|
||||||
70
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc/run
Executable file
70
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc/run
Executable file
@ -0,0 +1,70 @@
|
|||||||
|
#!/command/with-contenv bash
|
||||||
|
# shellcheck shell=bash
|
||||||
|
# Start the go2rtc service
|
||||||
|
|
||||||
|
set -o errexit -o nounset -o pipefail
|
||||||
|
|
||||||
|
# Logs should be sent to stdout so that s6 can collect them
|
||||||
|
|
||||||
|
function get_ip_and_port_from_supervisor() {
|
||||||
|
local ip_address
|
||||||
|
# Example: 192.168.1.10/24
|
||||||
|
local ip_regex='^([0-9]{1,3}\.[0-9]{1,3}\.[0-9]{1,3}\.[0-9]{1,3})/[0-9]{1,2}$'
|
||||||
|
if ip_address=$(
|
||||||
|
curl -fsSL \
|
||||||
|
-H "Authorization: Bearer ${SUPERVISOR_TOKEN}" \
|
||||||
|
-H "Content-Type: application/json" \
|
||||||
|
http://supervisor/network/interface/default/info |
|
||||||
|
jq --exit-status --raw-output '.data.ipv4.address[0]'
|
||||||
|
) && [[ "${ip_address}" =~ ${ip_regex} ]]; then
|
||||||
|
ip_address="${BASH_REMATCH[1]}"
|
||||||
|
echo "[INFO] Got IP address from supervisor: ${ip_address}"
|
||||||
|
else
|
||||||
|
echo "[WARN] Failed to get IP address from supervisor"
|
||||||
|
return 0
|
||||||
|
fi
|
||||||
|
|
||||||
|
local webrtc_port
|
||||||
|
local port_regex='^([0-9]{1,5})$'
|
||||||
|
if webrtc_port=$(
|
||||||
|
curl -fsSL \
|
||||||
|
-H "Authorization: Bearer ${SUPERVISOR_TOKEN}" \
|
||||||
|
-H "Content-Type: application/json" \
|
||||||
|
http://supervisor/addons/self/info |
|
||||||
|
jq --exit-status --raw-output '.data.network["8555/tcp"]'
|
||||||
|
) && [[ "${webrtc_port}" =~ ${port_regex} ]]; then
|
||||||
|
webrtc_port="${BASH_REMATCH[1]}"
|
||||||
|
echo "[INFO] Got WebRTC port from supervisor: ${webrtc_port}"
|
||||||
|
else
|
||||||
|
echo "[WARN] Failed to get WebRTC port from supervisor"
|
||||||
|
return 0
|
||||||
|
fi
|
||||||
|
|
||||||
|
export FRIGATE_GO2RTC_WEBRTC_CANDIDATE_INTERNAL="${ip_address}:${webrtc_port}"
|
||||||
|
}
|
||||||
|
|
||||||
|
if [[ ! -f "/dev/shm/go2rtc.yaml" ]]; then
|
||||||
|
echo "[INFO] Preparing go2rtc config..."
|
||||||
|
|
||||||
|
if [[ -n "${SUPERVISOR_TOKEN:-}" ]]; then
|
||||||
|
# Running as a Home Assistant add-on, infer the IP address and port
|
||||||
|
get_ip_and_port_from_supervisor
|
||||||
|
fi
|
||||||
|
|
||||||
|
python3 /usr/local/go2rtc/create_config.py
|
||||||
|
fi
|
||||||
|
|
||||||
|
readonly config_path="/config"
|
||||||
|
|
||||||
|
if [[ -x "${config_path}/go2rtc" ]]; then
|
||||||
|
readonly binary_path="${config_path}/go2rtc"
|
||||||
|
echo "[WARN] Using go2rtc binary from '${binary_path}' instead of the embedded one"
|
||||||
|
else
|
||||||
|
readonly binary_path="/usr/local/go2rtc/bin/go2rtc"
|
||||||
|
fi
|
||||||
|
|
||||||
|
echo "[INFO] Starting go2rtc..."
|
||||||
|
|
||||||
|
# Replace the bash process with the go2rtc process, redirecting stderr to stdout
|
||||||
|
exec 2>&1
|
||||||
|
exec "${binary_path}" -config=/dev/shm/go2rtc.yaml
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc/timeout-kill
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc/timeout-kill
Normal file
@ -0,0 +1 @@
|
|||||||
|
30000
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc/type
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/go2rtc/type
Normal file
@ -0,0 +1 @@
|
|||||||
|
longrun
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/log-prepare/type
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/log-prepare/type
Normal file
@ -0,0 +1 @@
|
|||||||
|
oneshot
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/log-prepare/up
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/log-prepare/up
Normal file
@ -0,0 +1 @@
|
|||||||
|
/etc/s6-overlay/s6-rc.d/log-prepare/run
|
||||||
@ -0,0 +1 @@
|
|||||||
|
nginx
|
||||||
@ -0,0 +1 @@
|
|||||||
|
nginx-pipeline
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/nginx-log/type
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/nginx-log/type
Normal file
@ -0,0 +1 @@
|
|||||||
|
longrun
|
||||||
30
docker/rootfs/etc/s6-overlay/s6-rc.d/nginx/finish
Executable file
30
docker/rootfs/etc/s6-overlay/s6-rc.d/nginx/finish
Executable file
@ -0,0 +1,30 @@
|
|||||||
|
#!/command/with-contenv bash
|
||||||
|
# shellcheck shell=bash
|
||||||
|
# Take down the S6 supervision tree when the service fails
|
||||||
|
|
||||||
|
set -o errexit -o nounset -o pipefail
|
||||||
|
|
||||||
|
# Logs should be sent to stdout so that s6 can collect them
|
||||||
|
|
||||||
|
declare exit_code_container
|
||||||
|
exit_code_container=$(cat /run/s6-linux-init-container-results/exitcode)
|
||||||
|
readonly exit_code_container
|
||||||
|
readonly exit_code_service="${1}"
|
||||||
|
readonly exit_code_signal="${2}"
|
||||||
|
readonly service="NGINX"
|
||||||
|
|
||||||
|
echo "[INFO] Service ${service} exited with code ${exit_code_service} (by signal ${exit_code_signal})"
|
||||||
|
|
||||||
|
if [[ "${exit_code_service}" -eq 256 ]]; then
|
||||||
|
if [[ "${exit_code_container}" -eq 0 ]]; then
|
||||||
|
echo $((128 + exit_code_signal)) >/run/s6-linux-init-container-results/exitcode
|
||||||
|
fi
|
||||||
|
if [[ "${exit_code_signal}" -eq 15 ]]; then
|
||||||
|
exec /run/s6/basedir/bin/halt
|
||||||
|
fi
|
||||||
|
elif [[ "${exit_code_service}" -ne 0 ]]; then
|
||||||
|
if [[ "${exit_code_container}" -eq 0 ]]; then
|
||||||
|
echo "${exit_code_service}" >/run/s6-linux-init-container-results/exitcode
|
||||||
|
fi
|
||||||
|
exec /run/s6/basedir/bin/halt
|
||||||
|
fi
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/nginx/producer-for
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/nginx/producer-for
Normal file
@ -0,0 +1 @@
|
|||||||
|
nginx-log
|
||||||
@ -2,6 +2,12 @@
|
|||||||
# shellcheck shell=bash
|
# shellcheck shell=bash
|
||||||
# Start the NGINX service
|
# Start the NGINX service
|
||||||
|
|
||||||
|
set -o errexit -o nounset -o pipefail
|
||||||
|
|
||||||
|
# Logs should be sent to stdout so that s6 can collect them
|
||||||
|
|
||||||
|
echo "[INFO] Starting NGINX..."
|
||||||
|
|
||||||
# Replace the bash process with the NGINX process, redirecting stderr to stdout
|
# Replace the bash process with the NGINX process, redirecting stderr to stdout
|
||||||
exec 2>&1
|
exec 2>&1
|
||||||
exec nginx
|
exec nginx
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/nginx/timeout-kill
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/nginx/timeout-kill
Normal file
@ -0,0 +1 @@
|
|||||||
|
30000
|
||||||
1
docker/rootfs/etc/s6-overlay/s6-rc.d/nginx/type
Normal file
1
docker/rootfs/etc/s6-overlay/s6-rc.d/nginx/type
Normal file
@ -0,0 +1 @@
|
|||||||
|
longrun
|
||||||
@ -1,16 +0,0 @@
|
|||||||
#!/command/with-contenv bash
|
|
||||||
# shellcheck shell=bash
|
|
||||||
# Take down the S6 supervision tree when the service exits
|
|
||||||
|
|
||||||
set -o errexit -o nounset -o pipefail
|
|
||||||
|
|
||||||
# Prepare exit code
|
|
||||||
if [[ "${1}" -eq 256 ]]; then
|
|
||||||
exit_code="$((128 + ${2}))"
|
|
||||||
else
|
|
||||||
exit_code="${1}"
|
|
||||||
fi
|
|
||||||
|
|
||||||
# Make the container exit with the same exit code as the service
|
|
||||||
echo "${exit_code}" > /run/s6-linux-init-container-results/exitcode
|
|
||||||
exec /run/s6/basedir/bin/halt
|
|
||||||
@ -1,11 +0,0 @@
|
|||||||
#!/command/with-contenv bash
|
|
||||||
# shellcheck shell=bash
|
|
||||||
# Start the Frigate service
|
|
||||||
|
|
||||||
set -o errexit -o nounset -o pipefail
|
|
||||||
|
|
||||||
cd /opt/frigate
|
|
||||||
|
|
||||||
# Replace the bash process with the Frigate process, redirecting stderr to stdout
|
|
||||||
exec 2>&1
|
|
||||||
exec python3 -u -m frigate
|
|
||||||
@ -1,8 +0,0 @@
|
|||||||
#!/command/with-contenv bash
|
|
||||||
# shellcheck shell=bash
|
|
||||||
# Take down the S6 supervision tree when the service fails, or restart it
|
|
||||||
# otherwise
|
|
||||||
|
|
||||||
if [[ "${1}" -ne 0 && "${1}" -ne 256 ]]; then
|
|
||||||
exec /run/s6/basedir/bin/halt
|
|
||||||
fi
|
|
||||||
@ -1,15 +0,0 @@
|
|||||||
#!/command/with-contenv bash
|
|
||||||
# shellcheck shell=bash
|
|
||||||
# Start the go2rtc service
|
|
||||||
|
|
||||||
set -o errexit -o nounset -o pipefail
|
|
||||||
|
|
||||||
if [[ -f "/config/frigate-go2rtc.yaml" ]]; then
|
|
||||||
config_path="/config/frigate-go2rtc.yaml"
|
|
||||||
else
|
|
||||||
config_path="/usr/local/go2rtc/go2rtc.yaml"
|
|
||||||
fi
|
|
||||||
|
|
||||||
# Replace the bash process with the go2rtc process, redirecting stderr to stdout
|
|
||||||
exec 2>&1
|
|
||||||
exec go2rtc -config="${config_path}"
|
|
||||||
@ -1,8 +0,0 @@
|
|||||||
#!/command/with-contenv bash
|
|
||||||
# shellcheck shell=bash
|
|
||||||
# Take down the S6 supervision tree when the service fails, or restart it
|
|
||||||
# otherwise
|
|
||||||
|
|
||||||
if [[ "${1}" -ne 0 && "${1}" -ne 256 ]]; then
|
|
||||||
exec /run/s6/basedir/bin/halt
|
|
||||||
fi
|
|
||||||
@ -1,5 +0,0 @@
|
|||||||
#!/command/with-contenv bash
|
|
||||||
# shellcheck shell=bash
|
|
||||||
|
|
||||||
exec 2>&1
|
|
||||||
exec python3 -u -m frigate "${@}"
|
|
||||||
109
docker/rootfs/usr/local/go2rtc/create_config.py
Normal file
109
docker/rootfs/usr/local/go2rtc/create_config.py
Normal file
@ -0,0 +1,109 @@
|
|||||||
|
"""Creates a go2rtc config file."""
|
||||||
|
|
||||||
|
import json
|
||||||
|
import os
|
||||||
|
import sys
|
||||||
|
|
||||||
|
import yaml
|
||||||
|
|
||||||
|
sys.path.insert(0, "/opt/frigate")
|
||||||
|
from frigate.const import BIRDSEYE_PIPE, BTBN_PATH # noqa: E402
|
||||||
|
from frigate.ffmpeg_presets import ( # noqa: E402
|
||||||
|
parse_preset_hardware_acceleration_encode,
|
||||||
|
)
|
||||||
|
|
||||||
|
sys.path.remove("/opt/frigate")
|
||||||
|
|
||||||
|
|
||||||
|
FRIGATE_ENV_VARS = {k: v for k, v in os.environ.items() if k.startswith("FRIGATE_")}
|
||||||
|
config_file = os.environ.get("CONFIG_FILE", "/config/config.yml")
|
||||||
|
|
||||||
|
# Check if we can use .yaml instead of .yml
|
||||||
|
config_file_yaml = config_file.replace(".yml", ".yaml")
|
||||||
|
if os.path.isfile(config_file_yaml):
|
||||||
|
config_file = config_file_yaml
|
||||||
|
|
||||||
|
with open(config_file) as f:
|
||||||
|
raw_config = f.read()
|
||||||
|
|
||||||
|
if config_file.endswith((".yaml", ".yml")):
|
||||||
|
config: dict[str, any] = yaml.safe_load(raw_config)
|
||||||
|
elif config_file.endswith(".json"):
|
||||||
|
config: dict[str, any] = json.loads(raw_config)
|
||||||
|
|
||||||
|
go2rtc_config: dict[str, any] = config.get("go2rtc", {})
|
||||||
|
|
||||||
|
# Need to enable CORS for go2rtc so the frigate integration / card work automatically
|
||||||
|
if go2rtc_config.get("api") is None:
|
||||||
|
go2rtc_config["api"] = {"origin": "*"}
|
||||||
|
elif go2rtc_config["api"].get("origin") is None:
|
||||||
|
go2rtc_config["api"]["origin"] = "*"
|
||||||
|
|
||||||
|
# we want to ensure that logs are easy to read
|
||||||
|
if go2rtc_config.get("log") is None:
|
||||||
|
go2rtc_config["log"] = {"format": "text"}
|
||||||
|
elif go2rtc_config["log"].get("format") is None:
|
||||||
|
go2rtc_config["log"]["format"] = "text"
|
||||||
|
|
||||||
|
if not go2rtc_config.get("webrtc", {}).get("candidates", []):
|
||||||
|
default_candidates = []
|
||||||
|
# use internal candidate if it was discovered when running through the add-on
|
||||||
|
internal_candidate = os.environ.get(
|
||||||
|
"FRIGATE_GO2RTC_WEBRTC_CANDIDATE_INTERNAL", None
|
||||||
|
)
|
||||||
|
if internal_candidate is not None:
|
||||||
|
default_candidates.append(internal_candidate)
|
||||||
|
# should set default stun server so webrtc can work
|
||||||
|
default_candidates.append("stun:8555")
|
||||||
|
|
||||||
|
go2rtc_config["webrtc"] = {"candidates": default_candidates}
|
||||||
|
else:
|
||||||
|
print(
|
||||||
|
"[INFO] Not injecting WebRTC candidates into go2rtc config as it has been set manually",
|
||||||
|
)
|
||||||
|
|
||||||
|
# sets default RTSP response to be equivalent to ?video=h264,h265&audio=aac
|
||||||
|
# this means user does not need to specify audio codec when using restream
|
||||||
|
# as source for frigate and the integration supports HLS playback
|
||||||
|
if go2rtc_config.get("rtsp") is None:
|
||||||
|
go2rtc_config["rtsp"] = {"default_query": "mp4"}
|
||||||
|
elif go2rtc_config["rtsp"].get("default_query") is None:
|
||||||
|
go2rtc_config["rtsp"]["default_query"] = "mp4"
|
||||||
|
|
||||||
|
# need to replace ffmpeg command when using ffmpeg4
|
||||||
|
if not os.path.exists(BTBN_PATH):
|
||||||
|
if go2rtc_config.get("ffmpeg") is None:
|
||||||
|
go2rtc_config["ffmpeg"] = {
|
||||||
|
"rtsp": "-fflags nobuffer -flags low_delay -stimeout 5000000 -user_agent go2rtc/ffmpeg -rtsp_transport tcp -i {input}"
|
||||||
|
}
|
||||||
|
elif go2rtc_config["ffmpeg"].get("rtsp") is None:
|
||||||
|
go2rtc_config["ffmpeg"][
|
||||||
|
"rtsp"
|
||||||
|
] = "-fflags nobuffer -flags low_delay -stimeout 5000000 -user_agent go2rtc/ffmpeg -rtsp_transport tcp -i {input}"
|
||||||
|
|
||||||
|
for name in go2rtc_config.get("streams", {}):
|
||||||
|
stream = go2rtc_config["streams"][name]
|
||||||
|
|
||||||
|
if isinstance(stream, str):
|
||||||
|
go2rtc_config["streams"][name] = go2rtc_config["streams"][name].format(
|
||||||
|
**FRIGATE_ENV_VARS
|
||||||
|
)
|
||||||
|
elif isinstance(stream, list):
|
||||||
|
for i, stream in enumerate(stream):
|
||||||
|
go2rtc_config["streams"][name][i] = stream.format(**FRIGATE_ENV_VARS)
|
||||||
|
|
||||||
|
# add birdseye restream stream if enabled
|
||||||
|
if config.get("birdseye", {}).get("restream", False):
|
||||||
|
birdseye: dict[str, any] = config.get("birdseye")
|
||||||
|
|
||||||
|
input = f"-f rawvideo -pix_fmt yuv420p -video_size {birdseye.get('width', 1280)}x{birdseye.get('height', 720)} -r 10 -i {BIRDSEYE_PIPE}"
|
||||||
|
ffmpeg_cmd = f"exec:{parse_preset_hardware_acceleration_encode(config.get('ffmpeg', {}).get('hwaccel_args'), input, '-rtsp_transport tcp -f rtsp {output}')}"
|
||||||
|
|
||||||
|
if go2rtc_config.get("streams"):
|
||||||
|
go2rtc_config["streams"]["birdseye"] = ffmpeg_cmd
|
||||||
|
else:
|
||||||
|
go2rtc_config["streams"] = {"birdseye": ffmpeg_cmd}
|
||||||
|
|
||||||
|
# Write go2rtc_config to /dev/shm/go2rtc.yaml
|
||||||
|
with open("/dev/shm/go2rtc.yaml", "w") as f:
|
||||||
|
yaml.dump(go2rtc_config, f)
|
||||||
@ -1,4 +0,0 @@
|
|||||||
webrtc:
|
|
||||||
listen: ":8555"
|
|
||||||
candidates:
|
|
||||||
- stun:8555
|
|
||||||
@ -172,6 +172,27 @@ http {
|
|||||||
root /media/frigate;
|
root /media/frigate;
|
||||||
}
|
}
|
||||||
|
|
||||||
|
location /exports/ {
|
||||||
|
add_header 'Access-Control-Allow-Origin' "$http_origin" always;
|
||||||
|
add_header 'Access-Control-Allow-Credentials' 'true';
|
||||||
|
add_header 'Access-Control-Expose-Headers' 'Content-Length';
|
||||||
|
if ($request_method = 'OPTIONS') {
|
||||||
|
add_header 'Access-Control-Allow-Origin' "$http_origin";
|
||||||
|
add_header 'Access-Control-Max-Age' 1728000;
|
||||||
|
add_header 'Content-Type' 'text/plain charset=UTF-8';
|
||||||
|
add_header 'Content-Length' 0;
|
||||||
|
return 204;
|
||||||
|
}
|
||||||
|
|
||||||
|
types {
|
||||||
|
video/mp4 mp4;
|
||||||
|
}
|
||||||
|
|
||||||
|
autoindex on;
|
||||||
|
autoindex_format json;
|
||||||
|
root /media/frigate;
|
||||||
|
}
|
||||||
|
|
||||||
location /ws {
|
location /ws {
|
||||||
proxy_pass http://mqtt_ws/;
|
proxy_pass http://mqtt_ws/;
|
||||||
proxy_http_version 1.1;
|
proxy_http_version 1.1;
|
||||||
@ -204,6 +225,15 @@ http {
|
|||||||
proxy_set_header Host $host;
|
proxy_set_header Host $host;
|
||||||
}
|
}
|
||||||
|
|
||||||
|
location ~* /api/go2rtc([/]?.*)$ {
|
||||||
|
proxy_pass http://go2rtc;
|
||||||
|
rewrite ^/api/go2rtc(.*)$ /api$1 break;
|
||||||
|
proxy_http_version 1.1;
|
||||||
|
proxy_set_header Upgrade $http_upgrade;
|
||||||
|
proxy_set_header Connection "Upgrade";
|
||||||
|
proxy_set_header Host $host;
|
||||||
|
}
|
||||||
|
|
||||||
location ~* /api/.*\.(jpg|jpeg|png)$ {
|
location ~* /api/.*\.(jpg|jpeg|png)$ {
|
||||||
add_header 'Access-Control-Allow-Origin' '*';
|
add_header 'Access-Control-Allow-Origin' '*';
|
||||||
add_header 'Access-Control-Allow-Methods' 'GET, POST, PUT, DELETE, OPTIONS';
|
add_header 'Access-Control-Allow-Methods' 'GET, POST, PUT, DELETE, OPTIONS';
|
||||||
@ -221,6 +251,7 @@ http {
|
|||||||
|
|
||||||
add_header 'Access-Control-Allow-Origin' '*';
|
add_header 'Access-Control-Allow-Origin' '*';
|
||||||
add_header 'Access-Control-Allow-Methods' 'GET, POST, PUT, DELETE, OPTIONS';
|
add_header 'Access-Control-Allow-Methods' 'GET, POST, PUT, DELETE, OPTIONS';
|
||||||
|
add_header 'Access-Control-Allow-Headers' 'DNT,User-Agent,X-Requested-With,If-Modified-Since,Cache-Control,Content-Type,Range';
|
||||||
proxy_pass http://frigate_api/;
|
proxy_pass http://frigate_api/;
|
||||||
proxy_pass_request_headers on;
|
proxy_pass_request_headers on;
|
||||||
proxy_set_header Host $host;
|
proxy_set_header Host $host;
|
||||||
|
|||||||
@ -2,4 +2,4 @@
|
|||||||
|
|
||||||
This website is built using [Docusaurus 2](https://v2.docusaurus.io/), a modern static website generator.
|
This website is built using [Docusaurus 2](https://v2.docusaurus.io/), a modern static website generator.
|
||||||
|
|
||||||
For installation and contributing instructions, please follow the [Contributing Docs](https://blakeblackshear.github.io/frigate/contributing).
|
For installation and contributing instructions, please follow the [Contributing Docs](https://docs.frigate.video/development/contributing).
|
||||||
|
|||||||
@ -24,7 +24,6 @@ Examples of available modules are:
|
|||||||
- `frigate.app`
|
- `frigate.app`
|
||||||
- `frigate.mqtt`
|
- `frigate.mqtt`
|
||||||
- `frigate.object_detection`
|
- `frigate.object_detection`
|
||||||
- `frigate.zeroconf`
|
|
||||||
- `detector.<detector_name>`
|
- `detector.<detector_name>`
|
||||||
- `watchdog.<camera_name>`
|
- `watchdog.<camera_name>`
|
||||||
- `ffmpeg.<camera_name>.<sorted_roles>` NOTE: All FFmpeg logs are sent as `error` level.
|
- `ffmpeg.<camera_name>.<sorted_roles>` NOTE: All FFmpeg logs are sent as `error` level.
|
||||||
@ -42,7 +41,7 @@ environment_vars:
|
|||||||
|
|
||||||
### `database`
|
### `database`
|
||||||
|
|
||||||
Event and recording information is managed in a sqlite database at `/media/frigate/frigate.db`. If that database is deleted, recordings will be orphaned and will need to be cleaned up manually. They also won't show up in the Media Browser within Home Assistant.
|
Event and recording information is managed in a sqlite database at `/config/frigate.db`. If that database is deleted, recordings will be orphaned and will need to be cleaned up manually. They also won't show up in the Media Browser within Home Assistant.
|
||||||
|
|
||||||
If you are storing your database on a network share (SMB, NFS, etc), you may get a `database is locked` error message on startup. You can customize the location of the database in the config if necessary.
|
If you are storing your database on a network share (SMB, NFS, etc), you may get a `database is locked` error message on startup. You can customize the location of the database in the config if necessary.
|
||||||
|
|
||||||
@ -97,6 +96,16 @@ model:
|
|||||||
|
|
||||||
Note that if you rename objects in the labelmap, you will also need to update your `objects -> track` list as well.
|
Note that if you rename objects in the labelmap, you will also need to update your `objects -> track` list as well.
|
||||||
|
|
||||||
|
:::caution
|
||||||
|
|
||||||
|
Some labels have special handling and modifications can disable functionality.
|
||||||
|
|
||||||
|
`person` objects are associated with `face` and `amazon`
|
||||||
|
|
||||||
|
`car` objects are associated with `license_plate`, `ups`, `fedex`, `amazon`
|
||||||
|
|
||||||
|
:::
|
||||||
|
|
||||||
## Custom ffmpeg build
|
## Custom ffmpeg build
|
||||||
|
|
||||||
Included with Frigate is a build of ffmpeg that works for the vast majority of users. However, there exists some hardware setups which have incompatibilities with the included build. In this case, a docker volume mapping can be used to overwrite the included ffmpeg build with an ffmpeg build that works for your specific hardware setup.
|
Included with Frigate is a build of ffmpeg that works for the vast majority of users. However, there exists some hardware setups which have incompatibilities with the included build. In this case, a docker volume mapping can be used to overwrite the included ffmpeg build with an ffmpeg build that works for your specific hardware setup.
|
||||||
@ -105,6 +114,17 @@ To do this:
|
|||||||
|
|
||||||
1. Download your ffmpeg build and uncompress to a folder on the host (let's use `/home/appdata/frigate/custom-ffmpeg` for this example).
|
1. Download your ffmpeg build and uncompress to a folder on the host (let's use `/home/appdata/frigate/custom-ffmpeg` for this example).
|
||||||
2. Update your docker-compose or docker CLI to include `'/home/appdata/frigate/custom-ffmpeg':'/usr/lib/btbn-ffmpeg':'ro'` in the volume mappings.
|
2. Update your docker-compose or docker CLI to include `'/home/appdata/frigate/custom-ffmpeg':'/usr/lib/btbn-ffmpeg':'ro'` in the volume mappings.
|
||||||
3. Restart frigate and the custom version will be used if the mapping was done correctly.
|
3. Restart Frigate and the custom version will be used if the mapping was done correctly.
|
||||||
|
|
||||||
NOTE: The folder that is mapped from the host needs to be the folder that contains `/bin`. So if the full structure is `/home/appdata/frigate/custom-ffmpeg/bin/ffmpeg` then `/home/appdata/frigate/custom-ffmpeg` needs to be mapped to `/usr/lib/btbn-ffmpeg`.
|
NOTE: The folder that is mapped from the host needs to be the folder that contains `/bin`. So if the full structure is `/home/appdata/frigate/custom-ffmpeg/bin/ffmpeg` then `/home/appdata/frigate/custom-ffmpeg` needs to be mapped to `/usr/lib/btbn-ffmpeg`.
|
||||||
|
|
||||||
|
## Custom go2rtc version
|
||||||
|
|
||||||
|
Frigate currently includes go2rtc v1.5.0, there may be certain cases where you want to run a different version of go2rtc.
|
||||||
|
|
||||||
|
To do this:
|
||||||
|
|
||||||
|
1. Download the go2rtc build to the /config folder.
|
||||||
|
2. Rename the build to `go2rtc`.
|
||||||
|
3. Give `go2rtc` execute permission.
|
||||||
|
4. Restart Frigate and the custom version will be used, you can verify by checking go2rtc logs.
|
||||||
|
|||||||
@ -33,3 +33,25 @@ cameras:
|
|||||||
birdseye:
|
birdseye:
|
||||||
enabled: False
|
enabled: False
|
||||||
```
|
```
|
||||||
|
|
||||||
|
### Sorting cameras in the Birdseye view
|
||||||
|
|
||||||
|
It is possible to override the order of cameras that are being shown in the Birdseye view.
|
||||||
|
The order needs to be set at the camera level.
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
# Include all cameras by default in Birdseye view
|
||||||
|
birdseye:
|
||||||
|
enabled: True
|
||||||
|
mode: continuous
|
||||||
|
|
||||||
|
cameras:
|
||||||
|
front:
|
||||||
|
birdseye:
|
||||||
|
order: 1
|
||||||
|
back:
|
||||||
|
birdseye:
|
||||||
|
order: 2
|
||||||
|
```
|
||||||
|
|
||||||
|
*Note*: Cameras are sorted by default using their name to ensure a constant view inside Birdseye.
|
||||||
|
|||||||
@ -14,19 +14,19 @@ This page makes use of presets of FFmpeg args. For more information on presets,
|
|||||||
Note that mjpeg cameras require encoding the video into h264 for recording, and restream roles. This will use significantly more CPU than if the cameras supported h264 feeds directly. It is recommended to use the restream role to create an h264 restream and then use that as the source for ffmpeg.
|
Note that mjpeg cameras require encoding the video into h264 for recording, and restream roles. This will use significantly more CPU than if the cameras supported h264 feeds directly. It is recommended to use the restream role to create an h264 restream and then use that as the source for ffmpeg.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
mjpeg_cam: "ffmpeg:{your_mjpeg_stream_url}#video=h264#hardware" # <- use hardware acceleration to create an h264 stream usable for other components.
|
||||||
|
|
||||||
|
cameras:
|
||||||
|
...
|
||||||
mjpeg_cam:
|
mjpeg_cam:
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
inputs:
|
inputs:
|
||||||
- path: rtsp://localhost:8554/mjpeg_cam
|
- path: rtsp://127.0.0.1:8554/mjpeg_cam
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
- record
|
- record
|
||||||
- path: {your_mjpeg_stream_url}
|
|
||||||
roles:
|
|
||||||
- restream
|
|
||||||
restream:
|
|
||||||
enabled: true
|
|
||||||
video_encoding: h264
|
|
||||||
```
|
```
|
||||||
|
|
||||||
## JPEG Stream Cameras
|
## JPEG Stream Cameras
|
||||||
@ -106,31 +106,48 @@ If available, recommended settings are:
|
|||||||
According to [this discussion](https://github.com/blakeblackshear/frigate/issues/3235#issuecomment-1135876973), the http video streams seem to be the most reliable for Reolink.
|
According to [this discussion](https://github.com/blakeblackshear/frigate/issues/3235#issuecomment-1135876973), the http video streams seem to be the most reliable for Reolink.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
reolink:
|
||||||
|
- http://reolink_ip/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=username&password=password
|
||||||
|
- "ffmpeg:reolink#audio=opus"
|
||||||
|
reolink_sub:
|
||||||
|
- http://reolink_ip/flv?port=1935&app=bcs&stream=channel0_ext.bcs&user=username&password=password
|
||||||
|
|
||||||
cameras:
|
cameras:
|
||||||
reolink:
|
reolink:
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
input_args: preset-http-reolink
|
|
||||||
inputs:
|
inputs:
|
||||||
- path: http://reolink_ip/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=username&password=password
|
- path: rtsp://127.0.0.1:8554/reolink?video=copy&audio=aac
|
||||||
|
input_args: preset-rtsp-restream
|
||||||
roles:
|
roles:
|
||||||
- record
|
- record
|
||||||
- rtmp
|
- path: rtsp://127.0.0.1:8554/reolink_sub?video=copy
|
||||||
- path: http://reolink_ip/flv?port=1935&app=bcs&stream=channel0_ext.bcs&user=username&password=password
|
input_args: preset-rtsp-restream
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
detect:
|
|
||||||
width: 896
|
|
||||||
height: 672
|
|
||||||
fps: 7
|
|
||||||
```
|
```
|
||||||
|
|
||||||
### Unifi Protect Cameras
|
### Unifi Protect Cameras
|
||||||
|
|
||||||
In the Unifi 2.0 update Unifi Protect Cameras had a change in audio sample rate which causes issues for ffmpeg. The input rate needs to be set for record and rtmp.
|
Unifi protect cameras require the rtspx stream to be used with go2rtc.
|
||||||
|
To utilize a Unifi protect camera, modify the rtsps link to begin with rtspx.
|
||||||
|
Additionally, remove the "?enableSrtp" from the end of the Unifi link.
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
front:
|
||||||
|
- rtspx://192.168.1.1:7441/abcdefghijk
|
||||||
|
```
|
||||||
|
|
||||||
|
[See the go2rtc docs for more information](https://github.com/AlexxIT/go2rtc/tree/v1.5.0#source-rtsp)
|
||||||
|
|
||||||
|
In the Unifi 2.0 update Unifi Protect Cameras had a change in audio sample rate which causes issues for ffmpeg. The input rate needs to be set for record and rtmp if used directly with unifi protect.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
output_args:
|
output_args:
|
||||||
record: preset-record-ubiquiti
|
record: preset-record-ubiquiti
|
||||||
rtmp: preset-rtmp-ubiquiti
|
rtmp: preset-rtmp-ubiquiti # recommend using go2rtc instead
|
||||||
```
|
```
|
||||||
|
|||||||
@ -15,7 +15,6 @@ Each role can only be assigned to one input per camera. The options for roles ar
|
|||||||
| ---------- | ---------------------------------------------------------------------------------------- |
|
| ---------- | ---------------------------------------------------------------------------------------- |
|
||||||
| `detect` | Main feed for object detection |
|
| `detect` | Main feed for object detection |
|
||||||
| `record` | Saves segments of the video feed based on configuration settings. [docs](record.md) |
|
| `record` | Saves segments of the video feed based on configuration settings. [docs](record.md) |
|
||||||
| `restream` | Broadcast as RTSP feed and use the full res stream for live view. [docs](restream.md) |
|
|
||||||
| `rtmp` | Deprecated: Broadcast as an RTMP feed for other services to consume. [docs](restream.md) |
|
| `rtmp` | Deprecated: Broadcast as an RTMP feed for other services to consume. [docs](restream.md) |
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
@ -29,7 +28,7 @@ cameras:
|
|||||||
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
- rtmp
|
- rtmp # <- deprecated, recommend using restream instead
|
||||||
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/live
|
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/live
|
||||||
roles:
|
roles:
|
||||||
- record
|
- record
|
||||||
@ -49,3 +48,21 @@ cameras:
|
|||||||
```
|
```
|
||||||
|
|
||||||
For camera model specific settings check the [camera specific](camera_specific.md) infos.
|
For camera model specific settings check the [camera specific](camera_specific.md) infos.
|
||||||
|
|
||||||
|
## Setting up camera PTZ controls
|
||||||
|
|
||||||
|
Add onvif config to camera
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
cameras:
|
||||||
|
back:
|
||||||
|
ffmpeg:
|
||||||
|
...
|
||||||
|
onvif:
|
||||||
|
host: 10.0.10.10
|
||||||
|
port: 8000
|
||||||
|
user: admin
|
||||||
|
password: password
|
||||||
|
```
|
||||||
|
|
||||||
|
then PTZ controls will be available in the cameras WebUI.
|
||||||
|
|||||||
@ -101,7 +101,7 @@ The OpenVINO device to be used is specified using the `"device"` attribute accor
|
|||||||
|
|
||||||
OpenVINO is supported on 6th Gen Intel platforms (Skylake) and newer. A supported Intel platform is required to use the `GPU` device with OpenVINO. The `MYRIAD` device may be run on any platform, including Arm devices. For detailed system requirements, see [OpenVINO System Requirements](https://www.intel.com/content/www/us/en/developer/tools/openvino-toolkit/system-requirements.html)
|
OpenVINO is supported on 6th Gen Intel platforms (Skylake) and newer. A supported Intel platform is required to use the `GPU` device with OpenVINO. The `MYRIAD` device may be run on any platform, including Arm devices. For detailed system requirements, see [OpenVINO System Requirements](https://www.intel.com/content/www/us/en/developer/tools/openvino-toolkit/system-requirements.html)
|
||||||
|
|
||||||
An OpenVINO model is provided in the container at `/openvino-model/ssdlite_mobilenet_v2.xml` and is used by this detector type by default. The model comes from Intel's Open Model Zoo [SSDLite MobileNet V2](https://github.com/openvinotoolkit/open_model_zoo/tree/master/models/public/ssdlite_mobilenet_v2) and is converted to an FP16 precision IR model. Use the model configuration shown below when using the OpenVINO detector.
|
An OpenVINO model is provided in the container at `/openvino-model/ssdlite_mobilenet_v2.xml` and is used by this detector type by default. The model comes from Intel's Open Model Zoo [SSDLite MobileNet V2](https://github.com/openvinotoolkit/open_model_zoo/tree/master/models/public/ssdlite_mobilenet_v2) and is converted to an FP16 precision IR model. Use the model configuration shown below when using the OpenVINO detector with the default model.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
detectors:
|
detectors:
|
||||||
@ -119,6 +119,25 @@ model:
|
|||||||
labelmap_path: /openvino-model/coco_91cl_bkgr.txt
|
labelmap_path: /openvino-model/coco_91cl_bkgr.txt
|
||||||
```
|
```
|
||||||
|
|
||||||
|
This detector also supports some YOLO variants: YOLOX, YOLOv5, and YOLOv8 specifically. Other YOLO variants are not officially supported/tested. Frigate does not come with any yolo models preloaded, so you will need to supply your own models. This detector has been verified to work with the [yolox_tiny](https://github.com/openvinotoolkit/open_model_zoo/tree/master/models/public/yolox-tiny) model from Intel's Open Model Zoo. You can follow [these instructions](https://github.com/openvinotoolkit/open_model_zoo/tree/master/models/public/yolox-tiny#download-a-model-and-convert-it-into-openvino-ir-format) to retrieve the OpenVINO-compatible `yolox_tiny` model. Make sure that the model input dimensions match the `width` and `height` parameters, and `model_type` is set accordingly. See [Full Configuration Reference](/configuration/index.md#full-configuration-reference) for a list of possible `model_type` options. Below is an example of how `yolox_tiny` can be used in Frigate:
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
detectors:
|
||||||
|
ov:
|
||||||
|
type: openvino
|
||||||
|
device: AUTO
|
||||||
|
model:
|
||||||
|
path: /path/to/yolox_tiny.xml
|
||||||
|
|
||||||
|
model:
|
||||||
|
width: 416
|
||||||
|
height: 416
|
||||||
|
input_tensor: nchw
|
||||||
|
input_pixel_format: bgr
|
||||||
|
model_type: yolox
|
||||||
|
labelmap_path: /path/to/coco_80cl.txt
|
||||||
|
```
|
||||||
|
|
||||||
### Intel NCS2 VPU and Myriad X Setup
|
### Intel NCS2 VPU and Myriad X Setup
|
||||||
|
|
||||||
Intel produces a neural net inference accelleration chip called Myriad X. This chip was sold in their Neural Compute Stick 2 (NCS2) which has been discontinued. If intending to use the MYRIAD device for accelleration, additional setup is required to pass through the USB device. The host needs a udev rule installed to handle the NCS2 device.
|
Intel produces a neural net inference accelleration chip called Myriad X. This chip was sold in their Neural Compute Stick 2 (NCS2) which has been discontinued. If intending to use the MYRIAD device for accelleration, additional setup is required to pass through the USB device. The host needs a udev rule installed to handle the NCS2 device.
|
||||||
@ -179,12 +198,12 @@ To generate model files, create a new folder to save the models, download the sc
|
|||||||
|
|
||||||
```bash
|
```bash
|
||||||
mkdir trt-models
|
mkdir trt-models
|
||||||
wget https://raw.githubusercontent.com/blakeblackshear/frigate/docker/tensorrt_models.sh
|
wget https://github.com/blakeblackshear/frigate/raw/master/docker/tensorrt_models.sh
|
||||||
chmod +x tensorrt_models.sh
|
chmod +x tensorrt_models.sh
|
||||||
docker run --gpus=all --rm -it -v `pwd`/trt-models:/tensorrt_models -v `pwd`/tensorrt_models.sh:/tensorrt_models.sh nvcr.io/nvidia/tensorrt:22.07-py3 /tensorrt_models.sh
|
docker run --gpus=all --rm -it -v `pwd`/trt-models:/tensorrt_models -v `pwd`/tensorrt_models.sh:/tensorrt_models.sh nvcr.io/nvidia/tensorrt:22.07-py3 /tensorrt_models.sh
|
||||||
```
|
```
|
||||||
|
|
||||||
The `trt-models` folder can then be mapped into your frigate container as `trt-models` and the models referenced from the config.
|
The `trt-models` folder can then be mapped into your Frigate container as `trt-models` and the models referenced from the config.
|
||||||
|
|
||||||
If your GPU does not support FP16 operations, you can pass the environment variable `-e USE_FP16=False` to the `docker run` command to disable it.
|
If your GPU does not support FP16 operations, you can pass the environment variable `-e USE_FP16=False` to the `docker run` command to disable it.
|
||||||
|
|
||||||
@ -212,6 +231,10 @@ yolov4x-mish-320
|
|||||||
yolov4x-mish-640
|
yolov4x-mish-640
|
||||||
yolov7-tiny-288
|
yolov7-tiny-288
|
||||||
yolov7-tiny-416
|
yolov7-tiny-416
|
||||||
|
yolov7-640
|
||||||
|
yolov7-320
|
||||||
|
yolov7x-640
|
||||||
|
yolov7x-320
|
||||||
```
|
```
|
||||||
|
|
||||||
### Configuration Parameters
|
### Configuration Parameters
|
||||||
@ -233,3 +256,25 @@ model:
|
|||||||
width: 416
|
width: 416
|
||||||
height: 416
|
height: 416
|
||||||
```
|
```
|
||||||
|
|
||||||
|
## Deepstack / CodeProject.AI Server Detector
|
||||||
|
|
||||||
|
The Deepstack / CodeProject.AI Server detector for Frigate allows you to integrate Deepstack and CodeProject.AI object detection capabilities into Frigate. CodeProject.AI and DeepStack are open-source AI platforms that can be run on various devices such as the Raspberry Pi, Nvidia Jetson, and other compatible hardware. It is important to note that the integration is performed over the network, so the inference times may not be as fast as native Frigate detectors, but it still provides an efficient and reliable solution for object detection and tracking.
|
||||||
|
|
||||||
|
### Setup
|
||||||
|
|
||||||
|
To get started with CodeProject.AI, visit their [official website](https://www.codeproject.com/Articles/5322557/CodeProject-AI-Server-AI-the-easy-way) to follow the instructions to download and install the AI server on your preferred device. Detailed setup instructions for CodeProject.AI are outside the scope of the Frigate documentation.
|
||||||
|
|
||||||
|
To integrate CodeProject.AI into Frigate, you'll need to make the following changes to your Frigate configuration file:
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
detectors:
|
||||||
|
deepstack:
|
||||||
|
api_url: http://<your_codeproject_ai_server_ip>:<port>/v1/vision/detection
|
||||||
|
type: deepstack
|
||||||
|
api_timeout: 0.1 # seconds
|
||||||
|
```
|
||||||
|
|
||||||
|
Replace `<your_codeproject_ai_server_ip>` and `<port>` with the IP address and port of your CodeProject.AI server.
|
||||||
|
|
||||||
|
To verify that the integration is working correctly, start Frigate and observe the logs for any error messages related to CodeProject.AI. Additionally, you can check the Frigate web interface to see if the objects detected by CodeProject.AI are being displayed and tracked properly.
|
||||||
@ -7,7 +7,7 @@ Some presets of FFmpeg args are provided by default to make the configuration ea
|
|||||||
|
|
||||||
### Hwaccel Presets
|
### Hwaccel Presets
|
||||||
|
|
||||||
It is highly recommended to use hwaccel presets in the config. These presets not only replace the longer args, but they also give frigate hints of what hardware is available and allows frigate to make other optimizations using the GPU such as when encoding the birdseye restream or when scaling a stream that has a size different than the native stream size.
|
It is highly recommended to use hwaccel presets in the config. These presets not only replace the longer args, but they also give Frigate hints of what hardware is available and allows Frigate to make other optimizations using the GPU such as when encoding the birdseye restream or when scaling a stream that has a size different than the native stream size.
|
||||||
|
|
||||||
See [the hwaccel docs](/configuration/hardware_acceleration.md) for more info on how to setup hwaccel for your GPU / iGPU.
|
See [the hwaccel docs](/configuration/hardware_acceleration.md) for more info on how to setup hwaccel for your GPU / iGPU.
|
||||||
|
|
||||||
@ -26,17 +26,19 @@ See [the hwaccel docs](/configuration/hardware_acceleration.md) for more info on
|
|||||||
|
|
||||||
Input args presets help make the config more readable and handle use cases for different types of streams to ensure maximum compatibility.
|
Input args presets help make the config more readable and handle use cases for different types of streams to ensure maximum compatibility.
|
||||||
|
|
||||||
See [the camera specific docs](/configuration/camera_specific.md) for more info on non-standard cameras and recommendations for using them in frigate.
|
See [the camera specific docs](/configuration/camera_specific.md) for more info on non-standard cameras and recommendations for using them in Frigate.
|
||||||
|
|
||||||
| Preset | Usage | Other Notes |
|
| Preset | Usage | Other Notes |
|
||||||
| ------------------------- | ----------------------- | --------------------------------------------------- |
|
| -------------------------------- | ------------------------- | ------------------------------------------------------------------------------------------------ |
|
||||||
| preset-http-jpeg-generic | HTTP Live Jpeg | Recommend restreaming live jpeg instead |
|
| preset-http-jpeg-generic | HTTP Live Jpeg | Recommend restreaming live jpeg instead |
|
||||||
| preset-http-mjpeg-generic | HTTP Mjpeg Stream | Recommend restreaming mjpeg stream instead |
|
| preset-http-mjpeg-generic | HTTP Mjpeg Stream | Recommend restreaming mjpeg stream instead |
|
||||||
| preset-http-reolink | Reolink HTTP-FLV Stream | Only for reolink http, not when restreaming as rtsp |
|
| preset-http-reolink | Reolink HTTP-FLV Stream | Only for reolink http, not when restreaming as rtsp |
|
||||||
| preset-rtmp-generic | RTMP Stream | |
|
| preset-rtmp-generic | RTMP Stream | |
|
||||||
| preset-rtsp-generic | RTSP Stream | This is the default when nothing is specified |
|
| preset-rtsp-generic | RTSP Stream | This is the default when nothing is specified |
|
||||||
| preset-rtsp-udp | RTSP Stream via UDP | Use when camera is UDP only |
|
| preset-rtsp-restream | RTSP Stream from restream | Use for rtsp restream as source for frigate |
|
||||||
| preset-rtsp-blue-iris | Blue Iris RTSP Stream | Use when consuming a stream from Blue Iris |
|
| preset-rtsp-restream-low-latency | RTSP Stream from restream | Use for rtsp restream as source for frigate to lower latency, may cause issues with some cameras |
|
||||||
|
| preset-rtsp-udp | RTSP Stream via UDP | Use when camera is UDP only |
|
||||||
|
| preset-rtsp-blue-iris | Blue Iris RTSP Stream | Use when consuming a stream from Blue Iris |
|
||||||
|
|
||||||
:::caution
|
:::caution
|
||||||
|
|
||||||
@ -45,31 +47,33 @@ It is important to be mindful of input args when using restream because you can
|
|||||||
:::
|
:::
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
reolink_cam: http://192.168.0.139/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=admin&password=password
|
||||||
|
|
||||||
cameras:
|
cameras:
|
||||||
reolink_cam:
|
reolink_cam:
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
inputs:
|
inputs:
|
||||||
- path: http://192.168.0.139/flv?port=1935&app=bcs&stream=channel0_ext.bcs&user=admin&password={FRIGATE_CAM_PASSWORD}
|
- path: http://192.168.0.139/flv?port=1935&app=bcs&stream=channel0_ext.bcs&user=admin&password=password
|
||||||
input_args: preset-http-reolink
|
input_args: preset-http-reolink
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
- path: rtsp://192.168.0.10:8554/garage
|
- path: rtsp://127.0.0.1:8554/reolink_cam
|
||||||
input_args: preset-rtsp-generic
|
input_args: preset-rtsp-generic
|
||||||
roles:
|
roles:
|
||||||
- record
|
- record
|
||||||
- path: http://192.168.0.139/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=admin&password={FRIGATE_CAM_PASSWORD}
|
|
||||||
roles:
|
|
||||||
- restream
|
|
||||||
```
|
```
|
||||||
|
|
||||||
### Output Args Presets
|
### Output Args Presets
|
||||||
|
|
||||||
Output args presets help make the config more readable and handle use cases for different types of streams to ensure consistent recordings.
|
Output args presets help make the config more readable and handle use cases for different types of streams to ensure consistent recordings.
|
||||||
|
|
||||||
| Preset | Usage | Other Notes |
|
| Preset | Usage | Other Notes |
|
||||||
| --------------------------- | --------------------------------- | --------------------------------------------- |
|
| -------------------------------- | --------------------------------- | --------------------------------------------- |
|
||||||
| preset-record-generic | Record WITHOUT audio | This is the default when nothing is specified |
|
| preset-record-generic | Record WITHOUT audio | This is the default when nothing is specified |
|
||||||
| preset-record-generic-audio | Record WITH audio | Use this to enable audio in recordings |
|
| preset-record-generic-audio-aac | Record WITH aac audio | Use this to enable audio in recordings |
|
||||||
| preset-record-mjpeg | Record an mjpeg stream | Recommend restreaming mjpeg stream instead |
|
| preset-record-generic-audio-copy | Record WITH original audio | Use this to enable audio in recordings |
|
||||||
| preset-record-jpeg | Record live jpeg | Recommend restreaming live jpeg instead |
|
| preset-record-mjpeg | Record an mjpeg stream | Recommend restreaming mjpeg stream instead |
|
||||||
| preset-record-ubiquiti | Record ubiquiti stream with audio | Recordings with ubiquiti non-standard audio |
|
| preset-record-jpeg | Record live jpeg | Recommend restreaming live jpeg instead |
|
||||||
|
| preset-record-ubiquiti | Record ubiquiti stream with audio | Recordings with ubiquiti non-standard audio |
|
||||||
|
|||||||
@ -7,12 +7,6 @@ It is recommended to update your configuration to enable hardware accelerated de
|
|||||||
|
|
||||||
### Raspberry Pi 3/4
|
### Raspberry Pi 3/4
|
||||||
|
|
||||||
:::caution
|
|
||||||
|
|
||||||
There is currently a bug in ffmpeg that causes hwaccel to not work for the RPi kernel 5.15.61 and above. For more information see https://github.com/blakeblackshear/frigate/issues/3780
|
|
||||||
|
|
||||||
:::
|
|
||||||
|
|
||||||
Ensure you increase the allocated RAM for your GPU to at least 128 (raspi-config > Performance Options > GPU Memory).
|
Ensure you increase the allocated RAM for your GPU to at least 128 (raspi-config > Performance Options > GPU Memory).
|
||||||
**NOTICE**: If you are using the addon, you may need to turn off `Protection mode` for hardware acceleration.
|
**NOTICE**: If you are using the addon, you may need to turn off `Protection mode` for hardware acceleration.
|
||||||
|
|
||||||
@ -21,23 +15,120 @@ ffmpeg:
|
|||||||
hwaccel_args: preset-rpi-64-h264
|
hwaccel_args: preset-rpi-64-h264
|
||||||
```
|
```
|
||||||
|
|
||||||
### Intel-based CPUs (<10th Generation) via Quicksync
|
:::note
|
||||||
|
|
||||||
|
If running Frigate in docker, you either need to run in priviliged mode or be sure to map the /dev/video1x devices to Frigate
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
docker run -d \
|
||||||
|
--name frigate \
|
||||||
|
...
|
||||||
|
--device /dev/video10 \
|
||||||
|
ghcr.io/blakeblackshear/frigate:stable
|
||||||
|
```
|
||||||
|
|
||||||
|
:::
|
||||||
|
|
||||||
|
### Intel-based CPUs
|
||||||
|
|
||||||
|
#### Via VAAPI
|
||||||
|
|
||||||
|
VAAPI supports automatic profile selection so it will work automatically with both H.264 and H.265 streams. VAAPI is recommended for all generations of Intel-based CPUs if QSV does not work.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
hwaccel_args: preset-vaapi
|
hwaccel_args: preset-vaapi
|
||||||
```
|
```
|
||||||
**NOTICE**: With some of the processors, like the J4125, the default driver `iHD` doesn't seem to work correctly for hardware acceleration. You may need to change the driver to `i965` by adding the following environment variable `LIBVA_DRIVER_NAME=i965` to your docker-compose file or [in the frigate.yml for HA OS users](advanced.md#environment_vars).
|
|
||||||
|
|
||||||
### Intel-based CPUs (>=10th Generation) via Quicksync
|
**NOTICE**: With some of the processors, like the J4125, the default driver `iHD` doesn't seem to work correctly for hardware acceleration. You may need to change the driver to `i965` by adding the following environment variable `LIBVA_DRIVER_NAME=i965` to your docker-compose file or [in the `frigate.yaml` for HA OS users](advanced.md#environment_vars).
|
||||||
|
|
||||||
|
#### Via Quicksync (>=10th Generation only)
|
||||||
|
|
||||||
|
QSV must be set specifically based on the video encoding of the stream.
|
||||||
|
|
||||||
|
##### H.264 streams
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
hwaccel_args: preset-intel-qsv-h264
|
hwaccel_args: preset-intel-qsv-h264
|
||||||
```
|
```
|
||||||
|
|
||||||
|
##### H.265 streams
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
ffmpeg:
|
||||||
|
hwaccel_args: preset-intel-qsv-h265
|
||||||
|
```
|
||||||
|
|
||||||
|
#### Configuring Intel GPU Stats in Docker
|
||||||
|
|
||||||
|
Additional configuration is needed for the Docker container to be able to access the `intel_gpu_top` command for GPU stats. Three possible changes can be made:
|
||||||
|
|
||||||
|
1. Run the container as privileged.
|
||||||
|
2. Adding the `CAP_PERFMON` capability.
|
||||||
|
3. Setting the `perf_event_paranoid` low enough to allow access to the performance event system.
|
||||||
|
|
||||||
|
##### Run as privileged
|
||||||
|
|
||||||
|
This method works, but it gives more permissions to the container than are actually needed.
|
||||||
|
|
||||||
|
###### Docker Compose - Privileged
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
services:
|
||||||
|
frigate:
|
||||||
|
...
|
||||||
|
image: ghcr.io/blakeblackshear/frigate:stable
|
||||||
|
privileged: true
|
||||||
|
```
|
||||||
|
|
||||||
|
###### Docker Run CLI - Privileged
|
||||||
|
|
||||||
|
```bash
|
||||||
|
docker run -d \
|
||||||
|
--name frigate \
|
||||||
|
...
|
||||||
|
--privileged \
|
||||||
|
ghcr.io/blakeblackshear/frigate:stable
|
||||||
|
```
|
||||||
|
|
||||||
|
##### CAP_PERFMON
|
||||||
|
|
||||||
|
Only recent versions of Docker support the `CAP_PERFMON` capability. You can test to see if yours supports it by running: `docker run --cap-add=CAP_PERFMON hello-world`
|
||||||
|
|
||||||
|
###### Docker Compose - CAP_PERFMON
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
services:
|
||||||
|
frigate:
|
||||||
|
...
|
||||||
|
image: ghcr.io/blakeblackshear/frigate:stable
|
||||||
|
cap_add:
|
||||||
|
- CAP_PERFMON
|
||||||
|
```
|
||||||
|
|
||||||
|
###### Docker Run CLI - CAP_PERFMON
|
||||||
|
|
||||||
|
```bash
|
||||||
|
docker run -d \
|
||||||
|
--name frigate \
|
||||||
|
...
|
||||||
|
--cap-add=CAP_PERFMON \
|
||||||
|
ghcr.io/blakeblackshear/frigate:stable
|
||||||
|
```
|
||||||
|
|
||||||
|
##### perf_event_paranoid
|
||||||
|
|
||||||
|
_Note: This setting must be changed for the entire system._
|
||||||
|
|
||||||
|
For more information on the various values across different distributions, see https://askubuntu.com/questions/1400874/what-does-perf-paranoia-level-four-do.
|
||||||
|
|
||||||
|
Depending on your OS and kernel configuration, you may need to change the `/proc/sys/kernel/perf_event_paranoid` kernel tunable. You can test the change by running `sudo sh -c 'echo 2 >/proc/sys/kernel/perf_event_paranoid'` which will persist until a reboot. Make it permanent by running `sudo sh -c 'echo kernel.perf_event_paranoid=1 >> /etc/sysctl.d/local.conf'`
|
||||||
|
|
||||||
### AMD/ATI GPUs (Radeon HD 2000 and newer GPUs) via libva-mesa-driver
|
### AMD/ATI GPUs (Radeon HD 2000 and newer GPUs) via libva-mesa-driver
|
||||||
|
|
||||||
|
VAAPI supports automatic profile selection so it will work automatically with both H.264 and H.265 streams.
|
||||||
|
|
||||||
**Note:** You also need to set `LIBVA_DRIVER_NAME=radeonsi` as an environment variable on the container.
|
**Note:** You also need to set `LIBVA_DRIVER_NAME=radeonsi` as an environment variable on the container.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
@ -45,19 +136,25 @@ ffmpeg:
|
|||||||
hwaccel_args: preset-vaapi
|
hwaccel_args: preset-vaapi
|
||||||
```
|
```
|
||||||
|
|
||||||
### NVIDIA GPU
|
### NVIDIA GPUs
|
||||||
|
|
||||||
[Supported Nvidia GPUs for Decoding](https://developer.nvidia.com/video-encode-and-decode-gpu-support-matrix-new)
|
While older GPUs may work, it is recommended to use modern, supported GPUs. NVIDIA provides a [matrix of supported GPUs and features](https://developer.nvidia.com/video-encode-and-decode-gpu-support-matrix-new). If your card is on the list and supports CUVID/NVDEC, it will most likely work with Frigate for decoding. However, you must also use [a driver version that will work with FFmpeg](https://github.com/FFmpeg/nv-codec-headers/blob/master/README). Older driver versions may be missing symbols and fail to work, and older cards are not supported by newer driver versions. The only way around this is to [provide your own FFmpeg](/configuration/advanced#custom-ffmpeg-build) that will work with your driver version, but this is unsupported and may not work well if at all.
|
||||||
|
|
||||||
These instructions are based on the [jellyfin documentation](https://jellyfin.org/docs/general/administration/hardware-acceleration.html#nvidia-hardware-acceleration-on-docker-linux)
|
A more complete list of cards and their compatible drivers is available in the [driver release readme](https://download.nvidia.com/XFree86/Linux-x86_64/525.85.05/README/supportedchips.html).
|
||||||
|
|
||||||
|
If your distribution does not offer NVIDIA driver packages, you can [download them here](https://www.nvidia.com/en-us/drivers/unix/).
|
||||||
|
|
||||||
|
#### Configuring Nvidia GPUs in Docker
|
||||||
|
|
||||||
|
Additional configuration is needed for the Docker container to be able to access the NVIDIA GPU. The supported method for this is to install the [NVIDIA Container Toolkit](https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/install-guide.html#docker) and specify the GPU to Docker. How you do this depends on how Docker is being run:
|
||||||
|
|
||||||
|
##### Docker Compose - Nvidia GPU
|
||||||
|
|
||||||
Add `--gpus all` to your docker run command or update your compose file.
|
|
||||||
If you have multiple Nvidia graphic card, you can add them with their ids obtained via `nvidia-smi` command
|
|
||||||
```yaml
|
```yaml
|
||||||
services:
|
services:
|
||||||
frigate:
|
frigate:
|
||||||
...
|
...
|
||||||
image: blakeblackshear/frigate:stable
|
image: ghcr.io/blakeblackshear/frigate:stable
|
||||||
deploy: # <------------- Add this section
|
deploy: # <------------- Add this section
|
||||||
resources:
|
resources:
|
||||||
reservations:
|
reservations:
|
||||||
@ -68,11 +165,23 @@ services:
|
|||||||
capabilities: [gpu]
|
capabilities: [gpu]
|
||||||
```
|
```
|
||||||
|
|
||||||
|
##### Docker Run CLI - Nvidia GPU
|
||||||
|
|
||||||
|
```bash
|
||||||
|
docker run -d \
|
||||||
|
--name frigate \
|
||||||
|
...
|
||||||
|
--gpus=all \
|
||||||
|
ghcr.io/blakeblackshear/frigate:stable
|
||||||
|
```
|
||||||
|
|
||||||
|
#### Setup Decoder
|
||||||
|
|
||||||
The decoder you need to pass in the `hwaccel_args` will depend on the input video.
|
The decoder you need to pass in the `hwaccel_args` will depend on the input video.
|
||||||
|
|
||||||
A list of supported codecs (you can use `ffmpeg -decoders | grep cuvid` in the container to get a list)
|
A list of supported codecs (you can use `ffmpeg -decoders | grep cuvid` in the container to get the ones your card supports)
|
||||||
|
|
||||||
```shell
|
```
|
||||||
V..... h263_cuvid Nvidia CUVID H263 decoder (codec h263)
|
V..... h263_cuvid Nvidia CUVID H263 decoder (codec h263)
|
||||||
V..... h264_cuvid Nvidia CUVID H264 decoder (codec h264)
|
V..... h264_cuvid Nvidia CUVID H264 decoder (codec h264)
|
||||||
V..... hevc_cuvid Nvidia CUVID HEVC decoder (codec hevc)
|
V..... hevc_cuvid Nvidia CUVID HEVC decoder (codec hevc)
|
||||||
@ -93,12 +202,12 @@ ffmpeg:
|
|||||||
```
|
```
|
||||||
|
|
||||||
If everything is working correctly, you should see a significant improvement in performance.
|
If everything is working correctly, you should see a significant improvement in performance.
|
||||||
Verify that hardware decoding is working by running `nvidia-smi`, which should show the ffmpeg
|
Verify that hardware decoding is working by running `nvidia-smi`, which should show `ffmpeg`
|
||||||
processes:
|
processes:
|
||||||
|
|
||||||
:::note
|
:::note
|
||||||
|
|
||||||
nvidia-smi may not show ffmpeg processes when run inside the container [due to docker limitations](https://github.com/NVIDIA/nvidia-docker/issues/179#issuecomment-645579458)
|
`nvidia-smi` may not show `ffmpeg` processes when run inside the container [due to docker limitations](https://github.com/NVIDIA/nvidia-docker/issues/179#issuecomment-645579458).
|
||||||
|
|
||||||
:::
|
:::
|
||||||
|
|
||||||
@ -129,3 +238,7 @@ nvidia-smi may not show ffmpeg processes when run inside the container [due to d
|
|||||||
| 0 N/A N/A 12827 C ffmpeg 417MiB |
|
| 0 N/A N/A 12827 C ffmpeg 417MiB |
|
||||||
+-----------------------------------------------------------------------------+
|
+-----------------------------------------------------------------------------+
|
||||||
```
|
```
|
||||||
|
|
||||||
|
If you do not see these processes, check the `docker logs` for the container and look for decoding errors.
|
||||||
|
|
||||||
|
These instructions were originally based on the [Jellyfin documentation](https://jellyfin.org/docs/general/administration/hardware-acceleration.html#nvidia-hardware-acceleration-on-docker-linux).
|
||||||
|
|||||||
@ -3,7 +3,7 @@ id: index
|
|||||||
title: Configuration File
|
title: Configuration File
|
||||||
---
|
---
|
||||||
|
|
||||||
For Home Assistant Addon installations, the config file needs to be in the root of your Home Assistant config directory (same location as `configuration.yaml`) and named `frigate.yml`.
|
For Home Assistant Addon installations, the config file needs to be in the root of your Home Assistant config directory (same location as `configuration.yaml`). It can be named `frigate.yaml` or `frigate.yml`, but if both files exist `frigate.yaml` will be preferred and `frigate.yml` will be ignored.
|
||||||
|
|
||||||
For all other installation types, the config file should be mapped to `/config/config.yml` inside the container.
|
For all other installation types, the config file should be mapped to `/config/config.yml` inside the container.
|
||||||
|
|
||||||
@ -19,7 +19,6 @@ cameras:
|
|||||||
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
- restream
|
|
||||||
detect:
|
detect:
|
||||||
width: 1280
|
width: 1280
|
||||||
height: 720
|
height: 720
|
||||||
@ -27,7 +26,7 @@ cameras:
|
|||||||
|
|
||||||
### VSCode Configuration Schema
|
### VSCode Configuration Schema
|
||||||
|
|
||||||
VSCode (and VSCode addon) supports the JSON schemas which will automatically validate the config. This can be added by adding `# yaml-language-server: $schema=http://frigate_host:5000/api/config/schema.json` to the top of the config file. `frigate_host` being the IP address of frigate or `ccab4aaf-frigate` if running in the addon.
|
VSCode (and VSCode addon) supports the JSON schemas which will automatically validate the config. This can be added by adding `# yaml-language-server: $schema=http://frigate_host:5000/api/config/schema.json` to the top of the config file. `frigate_host` being the IP address of Frigate or `ccab4aaf-frigate` if running in the addon.
|
||||||
|
|
||||||
### Full configuration reference:
|
### Full configuration reference:
|
||||||
|
|
||||||
@ -37,6 +36,33 @@ It is not recommended to copy this full configuration file. Only specify values
|
|||||||
|
|
||||||
:::
|
:::
|
||||||
|
|
||||||
|
**Note:** The following values will be replaced at runtime by using environment variables
|
||||||
|
|
||||||
|
- `{FRIGATE_MQTT_USER}`
|
||||||
|
- `{FRIGATE_MQTT_PASSWORD}`
|
||||||
|
- `{FRIGATE_RTSP_USER}`
|
||||||
|
- `{FRIGATE_RTSP_PASSWORD}`
|
||||||
|
|
||||||
|
for example:
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
mqtt:
|
||||||
|
user: "{FRIGATE_MQTT_USER}"
|
||||||
|
password: "{FRIGATE_MQTT_PASSWORD}"
|
||||||
|
```
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
- path: rtsp://{FRIGATE_RTSP_USER}:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:8554/unicast
|
||||||
|
```
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
onvif:
|
||||||
|
host: 10.0.10.10
|
||||||
|
port: 8000
|
||||||
|
user: "{FRIGATE_RTSP_USER}"
|
||||||
|
password: "{FRIGATE_RTSP_PASSWORD}"
|
||||||
|
```
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
mqtt:
|
mqtt:
|
||||||
# Optional: Enable mqtt server (default: shown below)
|
# Optional: Enable mqtt server (default: shown below)
|
||||||
@ -52,6 +78,8 @@ mqtt:
|
|||||||
# NOTE: must be unique if you are running multiple instances
|
# NOTE: must be unique if you are running multiple instances
|
||||||
client_id: frigate
|
client_id: frigate
|
||||||
# Optional: user
|
# Optional: user
|
||||||
|
# NOTE: MQTT user can be specified with an environment variables that must begin with 'FRIGATE_'.
|
||||||
|
# e.g. user: '{FRIGATE_MQTT_USER}'
|
||||||
user: mqtt_user
|
user: mqtt_user
|
||||||
# Optional: password
|
# Optional: password
|
||||||
# NOTE: MQTT password can be specified with an environment variables that must begin with 'FRIGATE_'.
|
# NOTE: MQTT password can be specified with an environment variables that must begin with 'FRIGATE_'.
|
||||||
@ -85,7 +113,7 @@ detectors:
|
|||||||
# Optional: Database configuration
|
# Optional: Database configuration
|
||||||
database:
|
database:
|
||||||
# The path to store the SQLite DB (default: shown below)
|
# The path to store the SQLite DB (default: shown below)
|
||||||
path: /media/frigate/frigate.db
|
path: /config/frigate.db
|
||||||
|
|
||||||
# Optional: model modifications
|
# Optional: model modifications
|
||||||
model:
|
model:
|
||||||
@ -103,6 +131,9 @@ model:
|
|||||||
# Optional: Object detection model input tensor format
|
# Optional: Object detection model input tensor format
|
||||||
# Valid values are nhwc or nchw (default: shown below)
|
# Valid values are nhwc or nchw (default: shown below)
|
||||||
input_tensor: nhwc
|
input_tensor: nhwc
|
||||||
|
# Optional: Object detection model type, currently only used with the OpenVINO detector
|
||||||
|
# Valid values are ssd, yolox, yolov5, or yolov8 (default: shown below)
|
||||||
|
model_type: ssd
|
||||||
# Optional: Label name modifications. These are merged into the standard labelmap.
|
# Optional: Label name modifications. These are merged into the standard labelmap.
|
||||||
labelmap:
|
labelmap:
|
||||||
2: vehicle
|
2: vehicle
|
||||||
@ -124,6 +155,9 @@ environment_vars:
|
|||||||
birdseye:
|
birdseye:
|
||||||
# Optional: Enable birdseye view (default: shown below)
|
# Optional: Enable birdseye view (default: shown below)
|
||||||
enabled: True
|
enabled: True
|
||||||
|
# Optional: Restream birdseye via RTSP (default: shown below)
|
||||||
|
# NOTE: Enabling this will set birdseye to run 24/7 which may increase CPU usage somewhat.
|
||||||
|
restream: False
|
||||||
# Optional: Width of the output resolution (default: shown below)
|
# Optional: Width of the output resolution (default: shown below)
|
||||||
width: 1280
|
width: 1280
|
||||||
# Optional: Height of the output resolution (default: shown below)
|
# Optional: Height of the output resolution (default: shown below)
|
||||||
@ -141,7 +175,7 @@ birdseye:
|
|||||||
# More information about presets at https://docs.frigate.video/configuration/ffmpeg_presets
|
# More information about presets at https://docs.frigate.video/configuration/ffmpeg_presets
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
# Optional: global ffmpeg args (default: shown below)
|
# Optional: global ffmpeg args (default: shown below)
|
||||||
global_args: -hide_banner -loglevel warning
|
global_args: -hide_banner -loglevel warning -threads 2
|
||||||
# Optional: global hwaccel args (default: shown below)
|
# Optional: global hwaccel args (default: shown below)
|
||||||
# NOTE: See hardware acceleration docs for your specific device
|
# NOTE: See hardware acceleration docs for your specific device
|
||||||
hwaccel_args: []
|
hwaccel_args: []
|
||||||
@ -150,7 +184,7 @@ ffmpeg:
|
|||||||
# Optional: global output args
|
# Optional: global output args
|
||||||
output_args:
|
output_args:
|
||||||
# Optional: output args for detect streams (default: shown below)
|
# Optional: output args for detect streams (default: shown below)
|
||||||
detect: -f rawvideo -pix_fmt yuv420p
|
detect: -threads 2 -f rawvideo -pix_fmt yuv420p
|
||||||
# Optional: output args for record streams (default: shown below)
|
# Optional: output args for record streams (default: shown below)
|
||||||
record: preset-record-generic
|
record: preset-record-generic
|
||||||
# Optional: output args for rtmp streams (default: shown below)
|
# Optional: output args for rtmp streams (default: shown below)
|
||||||
@ -167,16 +201,15 @@ detect:
|
|||||||
# NOTE: Recommended value of 5. Ideally, try and reduce your FPS on the camera.
|
# NOTE: Recommended value of 5. Ideally, try and reduce your FPS on the camera.
|
||||||
fps: 5
|
fps: 5
|
||||||
# Optional: enables detection for the camera (default: True)
|
# Optional: enables detection for the camera (default: True)
|
||||||
# This value can be set via MQTT and will be updated in startup based on retained value
|
|
||||||
enabled: True
|
enabled: True
|
||||||
# Optional: Number of frames without a detection before frigate considers an object to be gone. (default: 5x the frame rate)
|
# Optional: Number of frames without a detection before Frigate considers an object to be gone. (default: 5x the frame rate)
|
||||||
max_disappeared: 25
|
max_disappeared: 25
|
||||||
# Optional: Configuration for stationary object tracking
|
# Optional: Configuration for stationary object tracking
|
||||||
stationary:
|
stationary:
|
||||||
# Optional: Frequency for confirming stationary objects (default: shown below)
|
# Optional: Frequency for confirming stationary objects (default: same as threshold)
|
||||||
# When set to 0, object detection will not confirm stationary objects until movement is detected.
|
# When set to 1, object detection will run to confirm the object still exists on every frame.
|
||||||
# If set to 10, object detection will run to confirm the object still exists on every 10th frame.
|
# If set to 10, object detection will run to confirm the object still exists on every 10th frame.
|
||||||
interval: 0
|
interval: 50
|
||||||
# Optional: Number of frames without a position change for an object to be considered stationary (default: 10x the frame rate or 10s)
|
# Optional: Number of frames without a position change for an object to be considered stationary (default: 10x the frame rate or 10s)
|
||||||
threshold: 50
|
threshold: 50
|
||||||
# Optional: Define a maximum number of frames for tracking a stationary object (default: not set, track forever)
|
# Optional: Define a maximum number of frames for tracking a stationary object (default: not set, track forever)
|
||||||
@ -192,6 +225,20 @@ detect:
|
|||||||
# Optional: Object specific values
|
# Optional: Object specific values
|
||||||
objects:
|
objects:
|
||||||
person: 1000
|
person: 1000
|
||||||
|
# Optional: Milliseconds to offset detect annotations by (default: shown below).
|
||||||
|
# There can often be latency between a recording and the detect process,
|
||||||
|
# especially when using separate streams for detect and record.
|
||||||
|
# Use this setting to make the timeline bounding boxes more closely align
|
||||||
|
# with the recording. The value can be positive or negative.
|
||||||
|
# TIP: Imagine there is an event clip with a person walking from left to right.
|
||||||
|
# If the event timeline bounding box is consistently to the left of the person
|
||||||
|
# then the value should be decreased. Similarly, if a person is walking from
|
||||||
|
# left to right and the bounding box is consistently ahead of the person
|
||||||
|
# then the value should be increased.
|
||||||
|
# TIP: This offset is dynamic so you can change the value and it will update existing
|
||||||
|
# events, this makes it easy to tune.
|
||||||
|
# WARNING: Fast moving objects will likely not have the bounding box align.
|
||||||
|
annotation_offset: 0
|
||||||
|
|
||||||
# Optional: Object configuration
|
# Optional: Object configuration
|
||||||
# NOTE: Can be overridden at the camera level
|
# NOTE: Can be overridden at the camera level
|
||||||
@ -228,27 +275,29 @@ motion:
|
|||||||
# Optional: The threshold passed to cv2.threshold to determine if a pixel is different enough to be counted as motion. (default: shown below)
|
# Optional: The threshold passed to cv2.threshold to determine if a pixel is different enough to be counted as motion. (default: shown below)
|
||||||
# Increasing this value will make motion detection less sensitive and decreasing it will make motion detection more sensitive.
|
# Increasing this value will make motion detection less sensitive and decreasing it will make motion detection more sensitive.
|
||||||
# The value should be between 1 and 255.
|
# The value should be between 1 and 255.
|
||||||
threshold: 25
|
threshold: 40
|
||||||
# Optional: Minimum size in pixels in the resized motion image that counts as motion (default: 30)
|
# Optional: The percentage of the image used to detect lightning or other substantial changes where motion detection
|
||||||
|
# needs to recalibrate. (default: shown below)
|
||||||
|
# Increasing this value will make motion detection more likely to consider lightning or ir mode changes as valid motion.
|
||||||
|
# Decreasing this value will make motion detection more likely to ignore large amounts of motion such as a person approaching
|
||||||
|
# a doorbell camera.
|
||||||
|
lightning_threshold: 0.8
|
||||||
|
# Optional: Minimum size in pixels in the resized motion image that counts as motion (default: shown below)
|
||||||
# Increasing this value will prevent smaller areas of motion from being detected. Decreasing will
|
# Increasing this value will prevent smaller areas of motion from being detected. Decreasing will
|
||||||
# make motion detection more sensitive to smaller moving objects.
|
# make motion detection more sensitive to smaller moving objects.
|
||||||
# As a rule of thumb:
|
# As a rule of thumb:
|
||||||
# - 15 - high sensitivity
|
# - 15 - high sensitivity
|
||||||
# - 30 - medium sensitivity
|
# - 30 - medium sensitivity
|
||||||
# - 50 - low sensitivity
|
# - 50 - low sensitivity
|
||||||
contour_area: 30
|
contour_area: 15
|
||||||
# Optional: Alpha value passed to cv2.accumulateWeighted when averaging the motion delta across multiple frames (default: shown below)
|
|
||||||
# Higher values mean the current frame impacts the delta a lot, and a single raindrop may register as motion.
|
|
||||||
# Too low and a fast moving person wont be detected as motion.
|
|
||||||
delta_alpha: 0.2
|
|
||||||
# Optional: Alpha value passed to cv2.accumulateWeighted when averaging frames to determine the background (default: shown below)
|
# Optional: Alpha value passed to cv2.accumulateWeighted when averaging frames to determine the background (default: shown below)
|
||||||
# Higher values mean the current frame impacts the average a lot, and a new object will be averaged into the background faster.
|
# Higher values mean the current frame impacts the average a lot, and a new object will be averaged into the background faster.
|
||||||
# Low values will cause things like moving shadows to be detected as motion for longer.
|
# Low values will cause things like moving shadows to be detected as motion for longer.
|
||||||
# https://www.geeksforgeeks.org/background-subtraction-in-an-image-using-concept-of-running-average/
|
# https://www.geeksforgeeks.org/background-subtraction-in-an-image-using-concept-of-running-average/
|
||||||
frame_alpha: 0.2
|
frame_alpha: 0.02
|
||||||
# Optional: Height of the resized motion frame (default: 50)
|
# Optional: Height of the resized motion frame (default: 50)
|
||||||
# This operates as an efficient blur alternative. Higher values will result in more granular motion detection at the expense
|
# Higher values will result in more granular motion detection at the expense of higher CPU usage.
|
||||||
# of higher CPU usage. Lower values result in less CPU, but small changes may not register as motion.
|
# Lower values result in less CPU, but small changes may not register as motion.
|
||||||
frame_height: 50
|
frame_height: 50
|
||||||
# Optional: motion mask
|
# Optional: motion mask
|
||||||
# NOTE: see docs for more detailed info on creating masks
|
# NOTE: see docs for more detailed info on creating masks
|
||||||
@ -256,7 +305,7 @@ motion:
|
|||||||
# Optional: improve contrast (default: shown below)
|
# Optional: improve contrast (default: shown below)
|
||||||
# Enables dynamic contrast improvement. This should help improve night detections at the cost of making motion detection more sensitive
|
# Enables dynamic contrast improvement. This should help improve night detections at the cost of making motion detection more sensitive
|
||||||
# for daytime.
|
# for daytime.
|
||||||
improve_contrast: False
|
improve_contrast: True
|
||||||
# Optional: Delay when updating camera motion through MQTT from ON -> OFF (default: shown below).
|
# Optional: Delay when updating camera motion through MQTT from ON -> OFF (default: shown below).
|
||||||
mqtt_off_delay: 30
|
mqtt_off_delay: 30
|
||||||
|
|
||||||
@ -266,11 +315,6 @@ record:
|
|||||||
# Optional: Enable recording (default: shown below)
|
# Optional: Enable recording (default: shown below)
|
||||||
# WARNING: If recording is disabled in the config, turning it on via
|
# WARNING: If recording is disabled in the config, turning it on via
|
||||||
# the UI or MQTT later will have no effect.
|
# the UI or MQTT later will have no effect.
|
||||||
# WARNING: Frigate does not currently support limiting recordings based
|
|
||||||
# on available disk space automatically. If using recordings,
|
|
||||||
# you must specify retention settings for a number of days that
|
|
||||||
# will fit within the available disk space of your drive or Frigate
|
|
||||||
# will crash.
|
|
||||||
enabled: False
|
enabled: False
|
||||||
# Optional: Number of minutes to wait between cleanup runs (default: shown below)
|
# Optional: Number of minutes to wait between cleanup runs (default: shown below)
|
||||||
# This can be used to reduce the frequency of deleting recording segments from disk if you want to minimize i/o
|
# This can be used to reduce the frequency of deleting recording segments from disk if you want to minimize i/o
|
||||||
@ -320,7 +364,6 @@ record:
|
|||||||
# NOTE: Can be overridden at the camera level
|
# NOTE: Can be overridden at the camera level
|
||||||
snapshots:
|
snapshots:
|
||||||
# Optional: Enable writing jpg snapshot to /media/frigate/clips (default: shown below)
|
# Optional: Enable writing jpg snapshot to /media/frigate/clips (default: shown below)
|
||||||
# This value can be set via MQTT and will be updated in startup based on retained value
|
|
||||||
enabled: False
|
enabled: False
|
||||||
# Optional: save a clean PNG copy of the snapshot image (default: shown below)
|
# Optional: save a clean PNG copy of the snapshot image (default: shown below)
|
||||||
clean_copy: True
|
clean_copy: True
|
||||||
@ -350,28 +393,21 @@ rtmp:
|
|||||||
enabled: False
|
enabled: False
|
||||||
|
|
||||||
# Optional: Restream configuration
|
# Optional: Restream configuration
|
||||||
# NOTE: Can be overridden at the camera level
|
# Uses https://github.com/AlexxIT/go2rtc (v1.5.0)
|
||||||
restream:
|
go2rtc:
|
||||||
# Optional: Enable the restream (default: True)
|
|
||||||
enabled: True
|
# Optional: jsmpeg stream configuration for WebUI
|
||||||
# Optional: Force audio compatibility with browsers (default: shown below)
|
live:
|
||||||
force_audio: True
|
# Optional: Set the name of the stream that should be used for live view
|
||||||
# Optional: Video encoding to be used. By default the codec will be copied but
|
# in frigate WebUI. (default: name of camera)
|
||||||
# it can be switched to another or an MJPEG stream can be encoded and restreamed
|
stream_name: camera_name
|
||||||
# as h264 (default: shown below)
|
# Optional: Set the height of the jsmpeg stream. (default: 720)
|
||||||
video_encoding: "copy"
|
# This must be less than or equal to the height of the detect stream. Lower resolutions
|
||||||
# Optional: Restream birdseye via RTSP (default: shown below)
|
# reduce bandwidth required for viewing the jsmpeg stream. Width is computed to match known aspect ratio.
|
||||||
# NOTE: Enabling this will set birdseye to run 24/7 which may increase CPU usage somewhat.
|
height: 720
|
||||||
birdseye: False
|
# Optional: Set the encode quality of the jsmpeg stream (default: shown below)
|
||||||
# Optional: jsmpeg stream configuration for WebUI
|
# 1 is the highest quality, and 31 is the lowest. Lower quality feeds utilize less CPU resources.
|
||||||
jsmpeg:
|
quality: 8
|
||||||
# Optional: Set the height of the jsmpeg stream. (default: 720)
|
|
||||||
# This must be less than or equal to the height of the detect stream. Lower resolutions
|
|
||||||
# reduce bandwidth required for viewing the jsmpeg stream. Width is computed to match known aspect ratio.
|
|
||||||
height: 720
|
|
||||||
# Optional: Set the encode quality of the jsmpeg stream (default: shown below)
|
|
||||||
# 1 is the highest quality, and 31 is the lowest. Lower quality feeds utilize less CPU resources.
|
|
||||||
quality: 8
|
|
||||||
|
|
||||||
# Optional: in-feed timestamp style configuration
|
# Optional: in-feed timestamp style configuration
|
||||||
# NOTE: Can be overridden at the camera level
|
# NOTE: Can be overridden at the camera level
|
||||||
@ -412,12 +448,12 @@ cameras:
|
|||||||
# Required: the path to the stream
|
# Required: the path to the stream
|
||||||
# NOTE: path may include environment variables, which must begin with 'FRIGATE_' and be referenced in {}
|
# NOTE: path may include environment variables, which must begin with 'FRIGATE_' and be referenced in {}
|
||||||
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||||
# Required: list of roles for this stream. valid values are: detect,record,restream,rtmp
|
# Required: list of roles for this stream. valid values are: detect,record,rtmp
|
||||||
# NOTICE: In addition to assigning the record, restream, and rtmp roles,
|
# NOTICE: In addition to assigning the record and rtmp roles,
|
||||||
# they must also be enabled in the camera config.
|
# they must also be enabled in the camera config.
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
- restream
|
- record
|
||||||
- rtmp
|
- rtmp
|
||||||
# Optional: stream specific global args (default: inherit)
|
# Optional: stream specific global args (default: inherit)
|
||||||
# global_args:
|
# global_args:
|
||||||
@ -447,6 +483,8 @@ cameras:
|
|||||||
# Required: List of x,y coordinates to define the polygon of the zone.
|
# Required: List of x,y coordinates to define the polygon of the zone.
|
||||||
# NOTE: Presence in a zone is evaluated only based on the bottom center of the objects bounding box.
|
# NOTE: Presence in a zone is evaluated only based on the bottom center of the objects bounding box.
|
||||||
coordinates: 545,1077,747,939,788,805
|
coordinates: 545,1077,747,939,788,805
|
||||||
|
# Optional: Number of consecutive frames required for object to be considered present in the zone. Allowed values are 1-10 (default: shown below)
|
||||||
|
inertia: 3
|
||||||
# Optional: List of objects that can trigger this zone (default: all tracked objects)
|
# Optional: List of objects that can trigger this zone (default: all tracked objects)
|
||||||
objects:
|
objects:
|
||||||
- person
|
- person
|
||||||
@ -484,4 +522,77 @@ cameras:
|
|||||||
order: 0
|
order: 0
|
||||||
# Optional: Whether or not to show the camera in the Frigate UI (default: shown below)
|
# Optional: Whether or not to show the camera in the Frigate UI (default: shown below)
|
||||||
dashboard: True
|
dashboard: True
|
||||||
|
|
||||||
|
# Optional: connect to ONVIF camera
|
||||||
|
# to enable PTZ controls.
|
||||||
|
onvif:
|
||||||
|
# Required: host of the camera being connected to.
|
||||||
|
host: 0.0.0.0
|
||||||
|
# Optional: ONVIF port for device (default: shown below).
|
||||||
|
port: 8000
|
||||||
|
# Optional: username for login.
|
||||||
|
# NOTE: Some devices require admin to access ONVIF.
|
||||||
|
user: admin
|
||||||
|
# Optional: password for login.
|
||||||
|
password: admin
|
||||||
|
|
||||||
|
# Optional: Configuration for how to sort the cameras in the Birdseye view.
|
||||||
|
birdseye:
|
||||||
|
# Optional: Adjust sort order of cameras in the Birdseye view. Larger numbers come later (default: shown below)
|
||||||
|
# By default the cameras are sorted alphabetically.
|
||||||
|
order: 0
|
||||||
|
|
||||||
|
# Optional
|
||||||
|
ui:
|
||||||
|
# Optional: Set the default live mode for cameras in the UI (default: shown below)
|
||||||
|
live_mode: mse
|
||||||
|
# Optional: Set a timezone to use in the UI (default: use browser local time)
|
||||||
|
# timezone: America/Denver
|
||||||
|
# Optional: Use an experimental recordings / camera view UI (default: shown below)
|
||||||
|
use_experimental: False
|
||||||
|
# Optional: Set the time format used.
|
||||||
|
# Options are browser, 12hour, or 24hour (default: shown below)
|
||||||
|
time_format: browser
|
||||||
|
# Optional: Set the date style for a specified length.
|
||||||
|
# Options are: full, long, medium, short
|
||||||
|
# Examples:
|
||||||
|
# short: 2/11/23
|
||||||
|
# medium: Feb 11, 2023
|
||||||
|
# full: Saturday, February 11, 2023
|
||||||
|
# (default: shown below).
|
||||||
|
date_style: short
|
||||||
|
# Optional: Set the time style for a specified length.
|
||||||
|
# Options are: full, long, medium, short
|
||||||
|
# Examples:
|
||||||
|
# short: 8:14 PM
|
||||||
|
# medium: 8:15:22 PM
|
||||||
|
# full: 8:15:22 PM Mountain Standard Time
|
||||||
|
# (default: shown below).
|
||||||
|
time_style: medium
|
||||||
|
# Optional: Ability to manually override the date / time styling to use strftime format
|
||||||
|
# https://www.gnu.org/software/libc/manual/html_node/Formatting-Calendar-Time.html
|
||||||
|
# possible values are shown above (default: not set)
|
||||||
|
strftime_fmt: "%Y/%m/%d %H:%M"
|
||||||
|
|
||||||
|
# Optional: Telemetry configuration
|
||||||
|
telemetry:
|
||||||
|
# Optional: Enabled network interfaces for bandwidth stats monitoring (default: shown below)
|
||||||
|
network_interfaces:
|
||||||
|
- eth
|
||||||
|
- enp
|
||||||
|
- eno
|
||||||
|
- ens
|
||||||
|
- wl
|
||||||
|
- lo
|
||||||
|
# Optional: Configure system stats
|
||||||
|
stats:
|
||||||
|
# Enable AMD GPU stats (default: shown below)
|
||||||
|
amd_gpu_stats: True
|
||||||
|
# Enable Intel GPU stats (default: shown below)
|
||||||
|
intel_gpu_stats: True
|
||||||
|
# Enable network bandwidth stats monitoring for camera ffmpeg processes, go2rtc, and object detectors. (default: shown below)
|
||||||
|
network_bandwidth: False
|
||||||
|
# Optional: Enable the latest version outbound check (default: shown below)
|
||||||
|
# NOTE: If you use the HomeAssistant integration, disabling this will prevent it from reporting new versions
|
||||||
|
version_check: True
|
||||||
```
|
```
|
||||||
|
|||||||
@ -3,39 +3,116 @@ id: live
|
|||||||
title: Live View
|
title: Live View
|
||||||
---
|
---
|
||||||
|
|
||||||
Frigate has different live view options, some of which require [restream](restream.md) to be enabled.
|
Frigate has different live view options, some of which require the bundled `go2rtc` to be configured as shown in the [step by step guide](/guides/configuring_go2rtc).
|
||||||
|
|
||||||
## Live View Options
|
## Live View Options
|
||||||
|
|
||||||
Live view options can be selected while viewing the live stream. The options are:
|
Live view options can be selected while viewing the live stream. The options are:
|
||||||
|
|
||||||
| Source | Latency | Frame Rate | Resolution | Audio | Requires Restream | Other Limitations |
|
| Source | Latency | Frame Rate | Resolution | Audio | Requires go2rtc | Other Limitations |
|
||||||
| ------ | ------- | -------------------------------------- | -------------- | ---------------------------- | ----------------- | -------------------------------- |
|
| ------ | ------- | ------------------------------------- | -------------- | ---------------------------- | --------------- | -------------------------------------------- |
|
||||||
| jsmpeg | low | same as `detect -> fps`, capped at 10 | same as detect | no | no | none |
|
| jsmpeg | low | same as `detect -> fps`, capped at 10 | same as detect | no | no | none |
|
||||||
| mse | low | native | native | yes (depends on audio codec) | yes | not supported on iOS or Firefox |
|
| mse | low | native | native | yes (depends on audio codec) | yes | not supported on iOS, Firefox is h.264 only |
|
||||||
| webrtc | lowest | native | native | yes (depends on audio codec) | yes | requires extra config |
|
| webrtc | lowest | native | native | yes (depends on audio codec) | yes | requires extra config, doesn't support h.265 |
|
||||||
|
|
||||||
|
### Audio Support
|
||||||
|
|
||||||
|
MSE Requires AAC audio, WebRTC requires PCMU/PCMA, or opus audio. If you want to support both MSE and WebRTC then your restream config needs to make sure both are enabled.
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
rtsp_cam: # <- for RTSP streams
|
||||||
|
- rtsp://192.168.1.5:554/live0 # <- stream which supports video & aac audio
|
||||||
|
- "ffmpeg:rtsp_cam#audio=opus" # <- copy of the stream which transcodes audio to the missing codec (usually will be opus)
|
||||||
|
http_cam: # <- for http streams
|
||||||
|
- http://192.168.50.155/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=user&password=password # <- stream which supports video & aac audio
|
||||||
|
- "ffmpeg:http_cam#audio=opus" # <- copy of the stream which transcodes audio to the missing codec (usually will be opus)
|
||||||
|
```
|
||||||
|
|
||||||
|
### Setting Stream For Live UI
|
||||||
|
|
||||||
|
There may be some cameras that you would prefer to use the sub stream for live view, but the main stream for recording. This can be done via `live -> stream_name`.
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
rtsp_cam:
|
||||||
|
- rtsp://192.168.1.5:554/live0 # <- stream which supports video & aac audio.
|
||||||
|
- "ffmpeg:rtsp_cam#audio=opus" # <- copy of the stream which transcodes audio to opus
|
||||||
|
rtsp_cam_sub:
|
||||||
|
- rtsp://192.168.1.5:554/substream # <- stream which supports video & aac audio.
|
||||||
|
- "ffmpeg:rtsp_cam_sub#audio=opus" # <- copy of the stream which transcodes audio to opus
|
||||||
|
|
||||||
|
cameras:
|
||||||
|
test_cam:
|
||||||
|
ffmpeg:
|
||||||
|
output_args:
|
||||||
|
record: preset-record-generic-audio-copy
|
||||||
|
inputs:
|
||||||
|
- path: rtsp://127.0.0.1:8554/test_cam # <--- the name here must match the name of the camera in restream
|
||||||
|
input_args: preset-rtsp-restream
|
||||||
|
roles:
|
||||||
|
- record
|
||||||
|
- path: rtsp://127.0.0.1:8554/test_cam_sub # <--- the name here must match the name of the camera_sub in restream
|
||||||
|
input_args: preset-rtsp-restream
|
||||||
|
roles:
|
||||||
|
- detect
|
||||||
|
live:
|
||||||
|
stream_name: rtsp_cam_sub
|
||||||
|
```
|
||||||
|
|
||||||
### WebRTC extra configuration:
|
### WebRTC extra configuration:
|
||||||
|
|
||||||
webRTC works by creating a websocket connection on extra ports. One of the following is required for webRTC to work:
|
WebRTC works by creating a TCP or UDP connection on port `8555`. However, it requires additional configuration:
|
||||||
* Frigate is run with `network_mode: host` to support automatic UDP port pass through locally and remotely. See https://github.com/AlexxIT/go2rtc#module-webrtc for more details
|
|
||||||
* Frigate is run with `network_mode: bridge` and has:
|
|
||||||
* Router setup to forward port `8555` to port `8555` on the frigate device.
|
|
||||||
* For local webRTC, you will need to create your own go2rtc config:
|
|
||||||
|
|
||||||
```yaml
|
- For external access, over the internet, setup your router to forward port `8555` to port `8555` on the Frigate device, for both TCP and UDP.
|
||||||
webrtc:
|
- For internal/local access, unless you are running through the add-on, you will also need to set the WebRTC candidates list in the go2rtc config. For example, if `192.168.1.10` is the local IP of the device running Frigate:
|
||||||
listen: ":8555"
|
|
||||||
candidates:
|
```yaml title="/config/frigate.yaml"
|
||||||
- <frigate host ip address>:8555 # <--- enter frigate host IP here
|
go2rtc:
|
||||||
- stun:8555
|
streams:
|
||||||
|
test_cam: ...
|
||||||
|
webrtc:
|
||||||
|
candidates:
|
||||||
|
- 192.168.1.10:8555
|
||||||
|
- stun:8555
|
||||||
|
```
|
||||||
|
|
||||||
|
- For access through Tailscale, the Frigate system's Tailscale IP must be added as a WebRTC candidate. Tailscale IPs all start with `100.`, and are reserved within the `100.0.0.0/8` CIDR block.
|
||||||
|
|
||||||
|
:::tip
|
||||||
|
|
||||||
|
This extra configuration may not be required if Frigate has been installed as a Home Assistant add-on, as Frigate uses the Supervisor's API to generate a WebRTC candidate.
|
||||||
|
|
||||||
|
However, it is recommended if issues occur to define the candidates manually. You should do this if the Frigate add-on fails to generate a valid candidate. If an error occurs you will see some warnings like the below in the add-on logs page during the initialization:
|
||||||
|
|
||||||
|
```log
|
||||||
|
[WARN] Failed to get IP address from supervisor
|
||||||
|
[WARN] Failed to get WebRTC port from supervisor
|
||||||
```
|
```
|
||||||
|
|
||||||
and pass that config to frigate via docker or `frigate-go2rtc.yaml` for addon users:
|
:::
|
||||||
|
|
||||||
See https://github.com/AlexxIT/go2rtc#module-webrtc for more details
|
:::note
|
||||||
|
|
||||||
|
If you are having difficulties getting WebRTC to work and you are running Frigate with docker, you may want to try changing the container network mode:
|
||||||
|
|
||||||
|
- `network: host`, in this mode you don't need to forward any ports. The services inside of the Frigate container will have full access to the network interfaces of your host machine as if they were running natively and not in a container. Any port conflicts will need to be resolved. This network mode is recommended by go2rtc, but we recommend you only use it if necessary.
|
||||||
|
- `network: bridge` is the default network driver, a bridge network is a Link Layer device which forwards traffic between network segments. You need to forward any ports that you want to be accessible from the host IP.
|
||||||
|
|
||||||
|
If not running in host mode, port 8555 will need to be mapped for the container:
|
||||||
|
|
||||||
|
docker-compose.yml
|
||||||
```yaml
|
```yaml
|
||||||
volumes:
|
services:
|
||||||
- /path/to/your/go2rtc.yaml:/config/frigate-go2rtc.yaml:ro
|
frigate:
|
||||||
|
...
|
||||||
|
ports:
|
||||||
|
- "8555:8555/tcp" # WebRTC over tcp
|
||||||
|
- "8555:8555/udp" # WebRTC over udp
|
||||||
```
|
```
|
||||||
|
|
||||||
|
:::
|
||||||
|
|
||||||
|
See [go2rtc WebRTC docs](https://github.com/AlexxIT/go2rtc/tree/v1.5.0#module-webrtc) for more information about this.
|
||||||
|
|||||||
@ -7,7 +7,7 @@ There are two types of masks available:
|
|||||||
|
|
||||||
**Motion masks**: Motion masks are used to prevent unwanted types of motion from triggering detection. Try watching the debug feed with `Motion Boxes` enabled to see what may be regularly detected as motion. For example, you want to mask out your timestamp, the sky, rooftops, etc. Keep in mind that this mask only prevents motion from being detected and does not prevent objects from being detected if object detection was started due to motion in unmasked areas. Motion is also used during object tracking to refine the object detection area in the next frame. Over masking will make it more difficult for objects to be tracked. To see this effect, create a mask, and then watch the video feed with `Motion Boxes` enabled again.
|
**Motion masks**: Motion masks are used to prevent unwanted types of motion from triggering detection. Try watching the debug feed with `Motion Boxes` enabled to see what may be regularly detected as motion. For example, you want to mask out your timestamp, the sky, rooftops, etc. Keep in mind that this mask only prevents motion from being detected and does not prevent objects from being detected if object detection was started due to motion in unmasked areas. Motion is also used during object tracking to refine the object detection area in the next frame. Over masking will make it more difficult for objects to be tracked. To see this effect, create a mask, and then watch the video feed with `Motion Boxes` enabled again.
|
||||||
|
|
||||||
**Object filter masks**: Object filter masks are used to filter out false positives for a given object type based on location. These should be used to filter any areas where it is not possible for an object of that type to be. The bottom center of the detected object's bounding box is evaluated against the mask. If it is in a masked area, it is assumed to be a false positive. For example, you may want to mask out rooftops, walls, the sky, treetops for people. For cars, masking locations other than the street or your driveway will tell frigate that anything in your yard is a false positive.
|
**Object filter masks**: Object filter masks are used to filter out false positives for a given object type based on location. These should be used to filter any areas where it is not possible for an object of that type to be. The bottom center of the detected object's bounding box is evaluated against the mask. If it is in a masked area, it is assumed to be a false positive. For example, you may want to mask out rooftops, walls, the sky, treetops for people. For cars, masking locations other than the street or your driveway will tell Frigate that anything in your yard is a false positive.
|
||||||
|
|
||||||
To create a poly mask:
|
To create a poly mask:
|
||||||
|
|
||||||
|
|||||||
@ -3,9 +3,11 @@ id: record
|
|||||||
title: Recording
|
title: Recording
|
||||||
---
|
---
|
||||||
|
|
||||||
Recordings can be enabled and are stored at `/media/frigate/recordings`. The folder structure for the recordings is `YYYY-MM/DD/HH/<camera_name>/MM.SS.mp4`. These recordings are written directly from your camera stream without re-encoding. Each camera supports a configurable retention policy in the config. Frigate chooses the largest matching retention value between the recording retention and the event retention when determining if a recording should be removed.
|
Recordings can be enabled and are stored at `/media/frigate/recordings`. The folder structure for the recordings is `YYYY-MM-DD/HH/<camera_name>/MM.SS.mp4`. These recordings are written directly from your camera stream without re-encoding. Each camera supports a configurable retention policy in the config. Frigate chooses the largest matching retention value between the recording retention and the event retention when determining if a recording should be removed.
|
||||||
|
|
||||||
H265 recordings can be viewed in Edge and Safari only. All other browsers require recordings to be encoded with H264.
|
New recording segments are written from the camera stream to cache, they are only moved to disk if they match the setup recording retention policy.
|
||||||
|
|
||||||
|
H265 recordings can be viewed in Chrome 108+, Edge and Safari only. All other browsers require recordings to be encoded with H264.
|
||||||
|
|
||||||
## Will Frigate delete old recordings if my storage runs out?
|
## Will Frigate delete old recordings if my storage runs out?
|
||||||
|
|
||||||
@ -37,9 +39,9 @@ Using Frigate UI, HomeAssistant, or MQTT, cameras can be automated to only recor
|
|||||||
|
|
||||||
Frigate saves from the stream with the `record` role in 10 second segments. These options determine which recording segments are kept for 24/7 recording (but can also affect events).
|
Frigate saves from the stream with the `record` role in 10 second segments. These options determine which recording segments are kept for 24/7 recording (but can also affect events).
|
||||||
|
|
||||||
Let's say you have frigate configured so that your doorbell camera would retain the last **2** days of 24/7 recording.
|
Let's say you have Frigate configured so that your doorbell camera would retain the last **2** days of 24/7 recording.
|
||||||
- With the `all` option all 48 hours of those two days would be kept and viewable.
|
- With the `all` option all 48 hours of those two days would be kept and viewable.
|
||||||
- With the `motion` option the only parts of those 48 hours would be segments that frigate detected motion. This is the middle ground option that won't keep all 48 hours, but will likely keep all segments of interest along with the potential for some extra segments.
|
- With the `motion` option the only parts of those 48 hours would be segments that Frigate detected motion. This is the middle ground option that won't keep all 48 hours, but will likely keep all segments of interest along with the potential for some extra segments.
|
||||||
- With the `active_objects` option the only segments that would be kept are those where there was a true positive object that was not considered stationary.
|
- With the `active_objects` option the only segments that would be kept are those where there was a true positive object that was not considered stationary.
|
||||||
|
|
||||||
The same options are available with events. Let's consider a scenario where you drive up and park in your driveway, go inside, then come back out 4 hours later.
|
The same options are available with events. Let's consider a scenario where you drive up and park in your driveway, go inside, then come back out 4 hours later.
|
||||||
@ -78,3 +80,7 @@ record:
|
|||||||
dog: 2
|
dog: 2
|
||||||
car: 7
|
car: 7
|
||||||
```
|
```
|
||||||
|
|
||||||
|
## How do I export recordings?
|
||||||
|
|
||||||
|
The export page in the Frigate WebUI allows for exporting real time clips with a designated start and stop time as well as exporting a timelapse for a designated start and stop time. These exports can take a while so it is important to leave the file until it is no longer in progress.
|
||||||
|
|||||||
@ -3,35 +3,38 @@ id: restream
|
|||||||
title: Restream
|
title: Restream
|
||||||
---
|
---
|
||||||
|
|
||||||
### RTSP
|
## RTSP
|
||||||
|
|
||||||
Frigate can restream your video feed as an RTSP feed for other applications such as Home Assistant to utilize it at `rtsp://<frigate_host>:8554/<camera_name>`. Port 8554 must be open. [This allows you to use a video feed for detection in frigate and Home Assistant live view at the same time without having to make two separate connections to the camera](#reduce-connections-to-camera). The video feed is copied from the original video feed directly to avoid re-encoding. This feed does not include any annotation by Frigate.
|
Frigate can restream your video feed as an RTSP feed for other applications such as Home Assistant to utilize it at `rtsp://<frigate_host>:8554/<camera_name>`. Port 8554 must be open. [This allows you to use a video feed for detection in Frigate and Home Assistant live view at the same time without having to make two separate connections to the camera](#reduce-connections-to-camera). The video feed is copied from the original video feed directly to avoid re-encoding. This feed does not include any annotation by Frigate.
|
||||||
|
|
||||||
#### Force Audio
|
Frigate uses [go2rtc](https://github.com/AlexxIT/go2rtc/tree/v1.5.0) to provide its restream and MSE/WebRTC capabilities. The go2rtc config is hosted at the `go2rtc` in the config, see [go2rtc docs](https://github.com/AlexxIT/go2rtc/tree/v1.5.0#configuration) for more advanced configurations and features.
|
||||||
|
|
||||||
Different live view technologies (ex: MSE, WebRTC) support different audio codecs. The `restream -> force_audio` flag tells the restream to make multiple streams available so that all live view technologies are supported. Some camera streams don't work well with this, in which case `restream -> force_audio` should be disabled.
|
:::note
|
||||||
|
|
||||||
#### Birdseye Restream
|
You can access the go2rtc webUI at `http://frigate_ip:5000/live/webrtc` which can be helpful to debug as well as provide useful information about your camera streams.
|
||||||
|
|
||||||
Birdseye RTSP restream can be enabled at `restream -> birdseye` and accessed at `rtsp://<frigate_host>:8554/birdseye`. Enabling the restream will cause birdseye to run 24/7 which may increase CPU usage somewhat.
|
:::
|
||||||
|
|
||||||
#### Changing Restream Codec
|
### Birdseye Restream
|
||||||
|
|
||||||
Generally it is recommended to let the codec from the camera be copied. But there may be some cases where h265 needs to be transcoded as h264 or an MJPEG stream can be encoded and restreamed as h264. In this case the encoding will need to be set, if any hardware acceleration presets are set then that will be used to encode the stream.
|
Birdseye RTSP restream can be enabled at `birdseye -> restream` and accessed at `rtsp://<frigate_host>:8554/birdseye`. Enabling the restream will cause birdseye to run 24/7 which may increase CPU usage somewhat.
|
||||||
|
|
||||||
|
### Securing Restream With Authentication
|
||||||
|
|
||||||
|
The go2rtc restream can be secured with RTSP based username / password authentication. Ex:
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
ffmpeg:
|
go2rtc:
|
||||||
hwaccel_args: your-hwaccel-preset # <- highly recommended so the GPU is used
|
rtsp:
|
||||||
|
username: "admin"
|
||||||
cameras:
|
password: "pass"
|
||||||
mjpeg_cam:
|
streams:
|
||||||
ffmpeg:
|
...
|
||||||
...
|
|
||||||
restream:
|
|
||||||
video_encoding: h264
|
|
||||||
```
|
```
|
||||||
|
|
||||||
### RTMP (Deprecated)
|
**NOTE:** This does not apply to localhost requests, there is no need to provide credentials when using the restream as a source for frigate cameras.
|
||||||
|
|
||||||
|
## RTMP (Deprecated)
|
||||||
|
|
||||||
In previous Frigate versions RTMP was used for re-streaming. RTMP has disadvantages however including being incompatible with H.265, high bitrates, and certain audio codecs. RTMP is deprecated and it is recommended to move to the new restream role.
|
In previous Frigate versions RTMP was used for re-streaming. RTMP has disadvantages however including being incompatible with H.265, high bitrates, and certain audio codecs. RTMP is deprecated and it is recommended to move to the new restream role.
|
||||||
|
|
||||||
@ -44,17 +47,36 @@ Some cameras only support one active connection or you may just want to have a s
|
|||||||
One connection is made to the camera. One for the restream, `detect` and `record` connect to the restream.
|
One connection is made to the camera. One for the restream, `detect` and `record` connect to the restream.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
rtsp_cam: # <- for RTSP streams
|
||||||
|
- rtsp://192.168.1.5:554/live0 # <- stream which supports video & aac audio
|
||||||
|
- "ffmpeg:rtsp_cam#audio=opus" # <- copy of the stream which transcodes audio to the missing codec (usually will be opus)
|
||||||
|
http_cam: # <- for other streams
|
||||||
|
- http://192.168.50.155/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=user&password=password # <- stream which supports video & aac audio
|
||||||
|
- "ffmpeg:http_cam#audio=opus" # <- copy of the stream which transcodes audio to the missing codec (usually will be opus)
|
||||||
|
|
||||||
cameras:
|
cameras:
|
||||||
test_cam:
|
rtsp_cam:
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
|
output_args:
|
||||||
|
record: preset-record-generic-audio-copy
|
||||||
inputs:
|
inputs:
|
||||||
- path: rtsp://localhost:8554/test_cam # <--- the name here must match the name of the camera
|
- path: rtsp://127.0.0.1:8554/rtsp_cam # <--- the name here must match the name of the camera in restream
|
||||||
|
input_args: preset-rtsp-restream
|
||||||
roles:
|
roles:
|
||||||
- record
|
- record
|
||||||
- detect
|
- detect
|
||||||
- path: rtsp://192.168.1.5:554/live0 # <--- 1 connection to camera stream
|
http_cam:
|
||||||
|
ffmpeg:
|
||||||
|
output_args:
|
||||||
|
record: preset-record-generic-audio-copy
|
||||||
|
inputs:
|
||||||
|
- path: rtsp://127.0.0.1:8554/http_cam # <--- the name here must match the name of the camera in restream
|
||||||
|
input_args: preset-rtsp-restream
|
||||||
roles:
|
roles:
|
||||||
- restream
|
- record
|
||||||
|
- detect
|
||||||
```
|
```
|
||||||
|
|
||||||
### With Sub Stream
|
### With Sub Stream
|
||||||
@ -62,17 +84,58 @@ cameras:
|
|||||||
Two connections are made to the camera. One for the sub stream, one for the restream, `record` connects to the restream.
|
Two connections are made to the camera. One for the sub stream, one for the restream, `record` connects to the restream.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
rtsp_cam:
|
||||||
|
- rtsp://192.168.1.5:554/live0 # <- stream which supports video & aac audio. This is only supported for rtsp streams, http must use ffmpeg
|
||||||
|
- "ffmpeg:rtsp_cam#audio=opus" # <- copy of the stream which transcodes audio to opus
|
||||||
|
rtsp_cam_sub:
|
||||||
|
- rtsp://192.168.1.5:554/substream # <- stream which supports video & aac audio. This is only supported for rtsp streams, http must use ffmpeg
|
||||||
|
- "ffmpeg:rtsp_cam_sub#audio=opus" # <- copy of the stream which transcodes audio to opus
|
||||||
|
http_cam:
|
||||||
|
- http://192.168.50.155/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=user&password=password # <- stream which supports video & aac audio. This is only supported for rtsp streams, http must use ffmpeg
|
||||||
|
- "ffmpeg:http_cam#audio=opus" # <- copy of the stream which transcodes audio to opus
|
||||||
|
http_cam_sub:
|
||||||
|
- http://192.168.50.155/flv?port=1935&app=bcs&stream=channel0_ext.bcs&user=user&password=password # <- stream which supports video & aac audio. This is only supported for rtsp streams, http must use ffmpeg
|
||||||
|
- "ffmpeg:http_cam_sub#audio=opus" # <- copy of the stream which transcodes audio to opus
|
||||||
|
|
||||||
cameras:
|
cameras:
|
||||||
test_cam:
|
rtsp_cam:
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
|
output_args:
|
||||||
|
record: preset-record-generic-audio-copy
|
||||||
inputs:
|
inputs:
|
||||||
- path: rtsp://localhost:8554/test_cam # <--- the name here must match the name of the camera
|
- path: rtsp://127.0.0.1:8554/rtsp_cam # <--- the name here must match the name of the camera in restream
|
||||||
|
input_args: preset-rtsp-restream
|
||||||
roles:
|
roles:
|
||||||
- record
|
- record
|
||||||
- path: rtsp://192.168.1.5:554/stream # <--- camera high res stream
|
- path: rtsp://127.0.0.1:8554/rtsp_cam_sub # <--- the name here must match the name of the camera_sub in restream
|
||||||
|
input_args: preset-rtsp-restream
|
||||||
roles:
|
roles:
|
||||||
- restream
|
- detect
|
||||||
- path: rtsp://192.168.1.5:554/substream # <--- camera sub stream
|
http_cam:
|
||||||
|
ffmpeg:
|
||||||
|
output_args:
|
||||||
|
record: preset-record-generic-audio-copy
|
||||||
|
inputs:
|
||||||
|
- path: rtsp://127.0.0.1:8554/http_cam # <--- the name here must match the name of the camera in restream
|
||||||
|
input_args: preset-rtsp-restream
|
||||||
|
roles:
|
||||||
|
- record
|
||||||
|
- path: rtsp://127.0.0.1:8554/http_cam_sub # <--- the name here must match the name of the camera_sub in restream
|
||||||
|
input_args: preset-rtsp-restream
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
```
|
```
|
||||||
|
|
||||||
|
## Advanced Restream Configurations
|
||||||
|
|
||||||
|
The [exec](https://github.com/AlexxIT/go2rtc/tree/v1.5.0#source-exec) source in go2rtc can be used for custom ffmpeg commands. An example is below:
|
||||||
|
|
||||||
|
NOTE: The output will need to be passed with two curly braces `{{output}}`
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
stream1: exec:ffmpeg -hide_banner -re -stream_loop -1 -i /media/BigBuckBunny.mp4 -c copy -rtsp_transport tcp -f rtsp {{output}}
|
||||||
|
```
|
||||||
|
|||||||
@ -4,3 +4,5 @@ title: Snapshots
|
|||||||
---
|
---
|
||||||
|
|
||||||
Frigate can save a snapshot image to `/media/frigate/clips` for each event named as `<camera>-<id>.jpg`.
|
Frigate can save a snapshot image to `/media/frigate/clips` for each event named as `<camera>-<id>.jpg`.
|
||||||
|
|
||||||
|
Snapshots sent via MQTT are configured in the [config file](https://docs.frigate.video/configuration/) under `cameras -> your_camera -> mqtt`
|
||||||
|
|||||||
@ -1,6 +1,6 @@
|
|||||||
# Stationary Objects
|
# Stationary Objects
|
||||||
|
|
||||||
An object is considered stationary when it is being tracked and has been in a very similar position for a certain number of frames. This number is defined in the configuration under `detect -> stationary -> threshold`, and is 10x the frame rate (or 10 seconds) by default. Once an object is considered stationary, it will remain stationary until motion occurs near the object at which point object detection will start running again. If the object changes location, it will be considered active.
|
An object is considered stationary when it is being tracked and has been in a very similar position for a certain number of frames. This number is defined in the configuration under `detect -> stationary -> threshold`, and is 10x the frame rate (or 10 seconds) by default. Once an object is considered stationary, it will remain stationary until motion occurs within the object at which point object detection will start running again. If the object changes location, it will be considered active.
|
||||||
|
|
||||||
## Why does it matter if an object is stationary?
|
## Why does it matter if an object is stationary?
|
||||||
|
|
||||||
@ -13,11 +13,11 @@ The default config is:
|
|||||||
```yaml
|
```yaml
|
||||||
detect:
|
detect:
|
||||||
stationary:
|
stationary:
|
||||||
interval: 0
|
interval: 50
|
||||||
threshold: 50
|
threshold: 50
|
||||||
```
|
```
|
||||||
|
|
||||||
`interval` is defined as the frequency for running detection on stationary objects. This means that by default once an object is considered stationary, detection will not be run on it until motion is detected. With `interval > 0`, every nth frames detection will be run to make sure the object is still there.
|
`interval` is defined as the frequency for running detection on stationary objects. This means that by default once an object is considered stationary, detection will not be run on it until motion is detected or until the interval (every 50th frame by default). With `interval >= 1`, every nth frames detection will be run to make sure the object is still there.
|
||||||
|
|
||||||
NOTE: There is no way to disable stationary object tracking with this value.
|
NOTE: There is no way to disable stationary object tracking with this value.
|
||||||
|
|
||||||
|
|||||||
@ -11,6 +11,24 @@ During testing, enable the Zones option for the debug feed so you can adjust as
|
|||||||
|
|
||||||
To create a zone, follow [the steps for a "Motion mask"](masks.md), but use the section of the web UI for creating a zone instead.
|
To create a zone, follow [the steps for a "Motion mask"](masks.md), but use the section of the web UI for creating a zone instead.
|
||||||
|
|
||||||
|
### Restricting events to specific zones
|
||||||
|
|
||||||
|
Often you will only want events to be created when an object enters areas of interest. This is done using zones along with setting required_zones. Let's say you only want to be notified when an object enters your entire_yard zone, the config would be:
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
camera:
|
||||||
|
record:
|
||||||
|
events:
|
||||||
|
required_zones:
|
||||||
|
- entire_yard
|
||||||
|
snapshots:
|
||||||
|
required_zones:
|
||||||
|
- entire_yard
|
||||||
|
zones:
|
||||||
|
entire_yard:
|
||||||
|
coordinates: ...
|
||||||
|
```
|
||||||
|
|
||||||
### Restricting zones to specific objects
|
### Restricting zones to specific objects
|
||||||
|
|
||||||
Sometimes you want to limit a zone to specific object types to have more granular control of when events/snapshots are saved. The following example will limit one zone to person objects and the other to cars.
|
Sometimes you want to limit a zone to specific object types to have more granular control of when events/snapshots are saved. The following example will limit one zone to person objects and the other to cars.
|
||||||
|
|||||||
@ -36,13 +36,19 @@ Fork [blakeblackshear/frigate-hass-integration](https://github.com/blakeblackshe
|
|||||||
- [Frigate source code](#frigate-core-web-and-docs)
|
- [Frigate source code](#frigate-core-web-and-docs)
|
||||||
- GNU make
|
- GNU make
|
||||||
- Docker
|
- Docker
|
||||||
- Extra Coral device (optional, but very helpful to simulate real world performance)
|
- An extra detector (Coral, OpenVINO, etc.) is optional but recommended to simulate real world performance.
|
||||||
|
|
||||||
|
:::note
|
||||||
|
|
||||||
|
A Coral device can only be used by a single process at a time, so an extra Coral device is recommended if using a coral for development purposes.
|
||||||
|
|
||||||
|
:::
|
||||||
|
|
||||||
### Setup
|
### Setup
|
||||||
|
|
||||||
#### 1. Open the repo with Visual Studio Code
|
#### 1. Open the repo with Visual Studio Code
|
||||||
|
|
||||||
Upon opening, you should be prompted to open the project in a remote container. This will build a container on top of the base frigate container with all the development dependencies installed. This ensures everyone uses a consistent development environment without the need to install any dependencies on your host machine.
|
Upon opening, you should be prompted to open the project in a remote container. This will build a container on top of the base Frigate container with all the development dependencies installed. This ensures everyone uses a consistent development environment without the need to install any dependencies on your host machine.
|
||||||
|
|
||||||
#### 2. Modify your local config file for testing
|
#### 2. Modify your local config file for testing
|
||||||
|
|
||||||
@ -62,7 +68,6 @@ cameras:
|
|||||||
input_args: -re -stream_loop -1 -fflags +genpts
|
input_args: -re -stream_loop -1 -fflags +genpts
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
- rtmp
|
|
||||||
detect:
|
detect:
|
||||||
height: 1080
|
height: 1080
|
||||||
width: 1920
|
width: 1920
|
||||||
@ -75,12 +80,12 @@ These input args tell ffmpeg to read the mp4 file in an infinite loop. You can u
|
|||||||
|
|
||||||
Create and place these files in a `debug` folder in the root of the repo. This is also where recordings will be created if you enable them in your test config. Update your config from step 2 above to point at the right file. You can check the `docker-compose.yml` file in the repo to see how the volumes are mapped.
|
Create and place these files in a `debug` folder in the root of the repo. This is also where recordings will be created if you enable them in your test config. Update your config from step 2 above to point at the right file. You can check the `docker-compose.yml` file in the repo to see how the volumes are mapped.
|
||||||
|
|
||||||
#### 4. Run frigate from the command line
|
#### 4. Run Frigate from the command line
|
||||||
|
|
||||||
VSCode will start the docker compose file for you and open a terminal window connected to `frigate-dev`.
|
VSCode will start the docker compose file for you and open a terminal window connected to `frigate-dev`.
|
||||||
|
|
||||||
- Run `python3 -m frigate` to start the backend.
|
- Run `python3 -m frigate` to start the backend.
|
||||||
- In a separate terminal window inside VS Code, change into the `web` directory and run `npm install && npm start` to start the frontend.
|
- In a separate terminal window inside VS Code, change into the `web` directory and run `npm install && npm run dev` to start the frontend.
|
||||||
|
|
||||||
#### 5. Teardown
|
#### 5. Teardown
|
||||||
|
|
||||||
|
|||||||
@ -3,7 +3,7 @@ id: camera_setup
|
|||||||
title: Camera setup
|
title: Camera setup
|
||||||
---
|
---
|
||||||
|
|
||||||
Cameras configured to output H.264 video and AAC audio will offer the most compatibility with all features of Frigate and Home Assistant. H.265 has better compression, but far less compatibility. Safari and Edge are the only browsers able to play H.265. Ideally, cameras should be configured directly for the desired resolutions and frame rates you want to use in Frigate. Reducing frame rates within Frigate will waste CPU resources decoding extra frames that are discarded. There are three different goals that you want to tune your stream configurations around.
|
Cameras configured to output H.264 video and AAC audio will offer the most compatibility with all features of Frigate and Home Assistant. H.265 has better compression, but less compatibility. Chrome 108+, Safari and Edge are the only browsers able to play H.265 and only support a limited number of H.265 profiles. Ideally, cameras should be configured directly for the desired resolutions and frame rates you want to use in Frigate. Reducing frame rates within Frigate will waste CPU resources decoding extra frames that are discarded. There are three different goals that you want to tune your stream configurations around.
|
||||||
|
|
||||||
- **Detection**: This is the only stream that Frigate will decode for processing. Also, this is the stream where snapshots will be generated from. The resolution for detection should be tuned for the size of the objects you want to detect. See [Choosing a detect resolution](#choosing-a-detect-resolution) for more details. The recommended frame rate is 5fps, but may need to be higher for very fast moving objects. Higher resolutions and frame rates will drive higher CPU usage on your server.
|
- **Detection**: This is the only stream that Frigate will decode for processing. Also, this is the stream where snapshots will be generated from. The resolution for detection should be tuned for the size of the objects you want to detect. See [Choosing a detect resolution](#choosing-a-detect-resolution) for more details. The recommended frame rate is 5fps, but may need to be higher for very fast moving objects. Higher resolutions and frame rates will drive higher CPU usage on your server.
|
||||||
|
|
||||||
@ -23,22 +23,14 @@ Larger resolutions **do** improve performance if the objects are very small in t
|
|||||||
|
|
||||||
For the Dahua/Loryta 5442 camera, I use the following settings:
|
For the Dahua/Loryta 5442 camera, I use the following settings:
|
||||||
|
|
||||||
**Main Stream (Recording)**
|
**Main Stream (Recording & RTSP)**
|
||||||
|
|
||||||
- Encode Mode: H.264
|
- Encode Mode: H.264
|
||||||
- Resolution: 2688\*1520
|
- Resolution: 2688\*1520
|
||||||
- Frame Rate(FPS): 15
|
- Frame Rate(FPS): 15
|
||||||
- I Frame Interval: 30
|
- I Frame Interval: 30
|
||||||
|
|
||||||
**Sub Stream 1 (RTMP)**
|
**Sub Stream (Detection)**
|
||||||
|
|
||||||
- Enable: Sub Stream 1
|
|
||||||
- Encode Mode: H.264
|
|
||||||
- Resolution: 720\*576
|
|
||||||
- Frame Rate: 10
|
|
||||||
- I Frame Interval: 10
|
|
||||||
|
|
||||||
**Sub Stream 2 (Detection)**
|
|
||||||
|
|
||||||
- Enable: Sub Stream 2
|
- Enable: Sub Stream 2
|
||||||
- Encode Mode: H.264
|
- Encode Mode: H.264
|
||||||
@ -23,15 +23,11 @@ I may earn a small commission for my endorsement, recommendation, testimonial, o
|
|||||||
|
|
||||||
My current favorite is the Minisforum GK41 because of the dual NICs that allow you to setup a dedicated private network for your cameras where they can be blocked from accessing the internet. There are many used workstation options on eBay that work very well. Anything with an Intel CPU and capable of running Debian should work fine. As a bonus, you may want to look for devices with a M.2 or PCIe express slot that is compatible with the Google Coral. I may earn a small commission for my endorsement, recommendation, testimonial, or link to any products or services from this website.
|
My current favorite is the Minisforum GK41 because of the dual NICs that allow you to setup a dedicated private network for your cameras where they can be blocked from accessing the internet. There are many used workstation options on eBay that work very well. Anything with an Intel CPU and capable of running Debian should work fine. As a bonus, you may want to look for devices with a M.2 or PCIe express slot that is compatible with the Google Coral. I may earn a small commission for my endorsement, recommendation, testimonial, or link to any products or services from this website.
|
||||||
|
|
||||||
| Name | Coral Inference Speed | Coral Compatibility | Notes |
|
| Name | Coral Inference Speed | Coral Compatibility | Notes |
|
||||||
| ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | --------------- | ------------------- | --------------------------------------------------------------------------------------------------------------------------------------- |
|
| ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | --------------------- | ------------------- | --------------------------------------------------------------------------------------------------------------------------------------- |
|
||||||
| Odyssey X86 Blue J4125 (<a href="https://amzn.to/3oH4BKi" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) (<a href="https://www.seeedstudio.com/Frigate-NVR-with-Odyssey-Blue-and-Coral-USB-Accelerator.html?utm_source=Frigate" target="_blank" rel="nofollow noopener sponsored">SeeedStudio</a>) | 9-10ms | M.2 B+M, USB | Dual gigabit NICs for easy isolated camera network. Easily handles several 1080p cameras. |
|
| Odyssey X86 Blue J4125 (<a href="https://amzn.to/3oH4BKi" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) (<a href="https://www.seeedstudio.com/Frigate-NVR-with-Odyssey-Blue-and-Coral-USB-Accelerator.html?utm_source=Frigate" target="_blank" rel="nofollow noopener sponsored">SeeedStudio</a>) | 9-10ms | M.2 B+M, USB | Dual gigabit NICs for easy isolated camera network. Easily handles several 1080p cameras. |
|
||||||
| Minisforum GK41 (<a href="https://amzn.to/3ptnb8D" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 9-10ms | USB | Dual gigabit NICs for easy isolated camera network. Easily handles several 1080p cameras. |
|
| Minisforum GK41 (<a href="https://amzn.to/3ptnb8D" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 9-10ms | USB | Dual gigabit NICs for easy isolated camera network. Easily handles several 1080p cameras. |
|
||||||
| Beelink GK55 (<a href="https://amzn.to/35E79BC" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 9-10ms | USB | Dual gigabit NICs for easy isolated camera network. Easily handles several 1080p cameras. |
|
| Intel NUC (<a href="https://amzn.to/3psFlHi" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 8-10ms | USB | Overkill for most, but great performance. Can handle many cameras at 5fps depending on typical amounts of motion. Requires extra parts. |
|
||||||
| Intel NUC (<a href="https://amzn.to/3psFlHi" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 8-10ms | USB | Overkill for most, but great performance. Can handle many cameras at 5fps depending on typical amounts of motion. Requires extra parts. |
|
|
||||||
| BMAX B2 Plus (<a href="https://amzn.to/3a6TBh8" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 10-12ms | USB | Good balance of performance and cost. Also capable of running many other services at the same time as frigate. |
|
|
||||||
| Atomic Pi (<a href="https://amzn.to/2YjpY9m" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 16ms | USB | Good option for a dedicated low power board with a small number of cameras. Can leverage Intel QuickSync for stream decoding. |
|
|
||||||
| Raspberry Pi 4 (64bit) (<a href="https://amzn.to/2YhSGHH" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 10-15ms | USB | Can handle a small number of cameras. |
|
|
||||||
|
|
||||||
## Detectors
|
## Detectors
|
||||||
|
|
||||||
@ -50,19 +46,29 @@ A single Coral can handle many cameras and will be sufficient for the majority o
|
|||||||
### OpenVino
|
### OpenVino
|
||||||
|
|
||||||
The OpenVINO detector type is able to run on:
|
The OpenVINO detector type is able to run on:
|
||||||
|
|
||||||
- 6th Gen Intel Platforms and newer that have an iGPU
|
- 6th Gen Intel Platforms and newer that have an iGPU
|
||||||
- x86 & Arm32/64 hosts with VPU Hardware (ex: Intel NCS2)
|
- x86 & Arm64 hosts with VPU Hardware (ex: Intel NCS2)
|
||||||
|
|
||||||
More information is available [in the detector docs](/configuration/detectors#openvino-detector)
|
More information is available [in the detector docs](/configuration/detectors#openvino-detector)
|
||||||
|
|
||||||
Inference speeds vary greatly depending on the CPU, GPU, or VPU used, some known examples are below:
|
Inference speeds vary greatly depending on the CPU, GPU, or VPU used, some known examples are below:
|
||||||
|
|
||||||
| Name | Inference Speed | Notes |
|
| Name | Inference Speed | Notes |
|
||||||
| ------------------- | --------------- | --------------------------------------------------------------------- |
|
| -------------------- | --------------- | --------------------------------------------------------------------- |
|
||||||
| Intel Celeron J4105 | ~ 25 ms | Inference speeds on CPU were ~ 150 ms |
|
| Intel NCS2 VPU | 60 - 65 ms | May vary based on host device |
|
||||||
| Intel Celeron N4020 | 50 - 200 ms | Inference speeds on CPU were ~ 800 ms, greatly depends on other loads |
|
| Intel Celeron J4105 | ~ 25 ms | Inference speeds on CPU were 150 - 200 ms |
|
||||||
| Intel NCS2 VPU | 60 - 65 ms | May vary based on host device |
|
| Intel Celeron N3060 | 130 - 150 ms | Inference speeds on CPU were ~ 550 ms |
|
||||||
| Intel i5 1135G7 | 10 - 15 ms | |
|
| Intel Celeron N3205U | ~ 120 ms | Inference speeds on CPU were ~ 380 ms |
|
||||||
|
| Intel Celeron N4020 | 50 - 200 ms | Inference speeds on CPU were ~ 800 ms, greatly depends on other loads |
|
||||||
|
| Intel i3 6100T | 15 - 35 ms | Inference speeds on CPU were 60 - 120 ms |
|
||||||
|
| Intel i3 8100 | ~ 15 ms | Inference speeds on CPU were ~ 65 ms |
|
||||||
|
| Intel i5 4590 | ~ 20 ms | Inference speeds on CPU were ~ 230 ms |
|
||||||
|
| Intel i5 6500 | ~ 15 ms | Inference speeds on CPU were ~ 150 ms |
|
||||||
|
| Intel i5 7200u | 15 - 25 ms | Inference speeds on CPU were ~ 150 ms |
|
||||||
|
| Intel i5 7500 | ~ 15 ms | Inference speeds on CPU were ~ 260 ms |
|
||||||
|
| Intel i5 1135G7 | 10 - 15 ms | |
|
||||||
|
| Intel i5 12600K | ~ 15 ms | Inference speeds on CPU were ~ 35 ms |
|
||||||
|
|
||||||
### TensorRT
|
### TensorRT
|
||||||
|
|
||||||
@ -71,10 +77,15 @@ The TensortRT detector is able to run on x86 hosts that have an Nvidia GPU which
|
|||||||
Inference speeds will vary greatly depending on the GPU and the model used.
|
Inference speeds will vary greatly depending on the GPU and the model used.
|
||||||
`tiny` variants are faster than the equivalent non-tiny model, some known examples are below:
|
`tiny` variants are faster than the equivalent non-tiny model, some known examples are below:
|
||||||
|
|
||||||
| Name | Model | Inference Speed |
|
| Name | Inference Speed |
|
||||||
| -------- | --------------- | --------------- |
|
| --------------- | --------------- |
|
||||||
| RTX 3050 | yolov4-tiny-416 | ~ 5 ms |
|
| GTX 1060 6GB | ~ 7 ms |
|
||||||
| RTX 3050 | yolov7-tiny-416 | ~ 6 ms |
|
| GTX 1070 | ~ 6 ms |
|
||||||
|
| GTX 1660 SUPER | ~ 4 ms |
|
||||||
|
| RTX 3050 | 5 - 7 ms |
|
||||||
|
| RTX 3070 Mobile | ~ 5 ms |
|
||||||
|
| Quadro P400 2GB | 20 - 25 ms |
|
||||||
|
| Quadro P2000 | ~ 12 ms |
|
||||||
|
|
||||||
## What does Frigate use the CPU for and what does it use a detector for? (ELI5 Version)
|
## What does Frigate use the CPU for and what does it use a detector for? (ELI5 Version)
|
||||||
|
|
||||||
|
|||||||
@ -21,12 +21,12 @@ Windows is not officially supported, but some users have had success getting it
|
|||||||
|
|
||||||
Frigate uses the following locations for read/write operations in the container. Docker volume mappings can be used to map these to any location on your host machine.
|
Frigate uses the following locations for read/write operations in the container. Docker volume mappings can be used to map these to any location on your host machine.
|
||||||
|
|
||||||
|
- `/config`: Used to store the Frigate config file and sqlite database. You will also see a few files alongside the database file while Frigate is running.
|
||||||
- `/media/frigate/clips`: Used for snapshot storage. In the future, it will likely be renamed from `clips` to `snapshots`. The file structure here cannot be modified and isn't intended to be browsed or managed manually.
|
- `/media/frigate/clips`: Used for snapshot storage. In the future, it will likely be renamed from `clips` to `snapshots`. The file structure here cannot be modified and isn't intended to be browsed or managed manually.
|
||||||
- `/media/frigate/recordings`: Internal system storage for recording segments. The file structure here cannot be modified and isn't intended to be browsed or managed manually.
|
- `/media/frigate/recordings`: Internal system storage for recording segments. The file structure here cannot be modified and isn't intended to be browsed or managed manually.
|
||||||
- `/media/frigate/frigate.db`: Default location for the sqlite database. You will also see several files alongside this file while frigate is running. If moving the database location (often needed when using a network drive at `/media/frigate`), it is recommended to mount a volume with docker at `/db` and change the storage location of the database to `/db/frigate.db` in the config file.
|
- `/media/frigate/exports`: Storage for clips and timelapses that have been exported via the WebUI or API.
|
||||||
- `/tmp/cache`: Cache location for recording segments. Initial recordings are written here before being checked and converted to mp4 and moved to the recordings folder.
|
- `/tmp/cache`: Cache location for recording segments. Initial recordings are written here before being checked and converted to mp4 and moved to the recordings folder.
|
||||||
- `/dev/shm`: It is not recommended to modify this directory or map it with docker. This is the location for raw decoded frames in shared memory and it's size is impacted by the `shm-size` calculations below.
|
- `/dev/shm`: It is not recommended to modify this directory or map it with docker. This is the location for raw decoded frames in shared memory and it's size is impacted by the `shm-size` calculations below.
|
||||||
- `/config/config.yml`: Default location of the config file.
|
|
||||||
|
|
||||||
#### Common docker compose storage configurations
|
#### Common docker compose storage configurations
|
||||||
|
|
||||||
@ -38,7 +38,7 @@ services:
|
|||||||
frigate:
|
frigate:
|
||||||
...
|
...
|
||||||
volumes:
|
volumes:
|
||||||
- /path/to/your/config.yml:/config/config.yml
|
- /path/to/your/config:/config
|
||||||
- /path/to/your/storage:/media/frigate
|
- /path/to/your/storage:/media/frigate
|
||||||
- type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
|
- type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
|
||||||
target: /tmp/cache
|
target: /tmp/cache
|
||||||
@ -47,44 +47,31 @@ services:
|
|||||||
...
|
...
|
||||||
```
|
```
|
||||||
|
|
||||||
Writing to a network drive with database on a local drive:
|
|
||||||
|
|
||||||
```yaml
|
|
||||||
version: "3.9"
|
|
||||||
services:
|
|
||||||
frigate:
|
|
||||||
...
|
|
||||||
volumes:
|
|
||||||
- /path/to/your/config.yml:/config/config.yml
|
|
||||||
- /path/to/network/storage:/media/frigate
|
|
||||||
- /path/to/local/disk:/db
|
|
||||||
- type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
|
|
||||||
target: /tmp/cache
|
|
||||||
tmpfs:
|
|
||||||
size: 1000000000
|
|
||||||
...
|
|
||||||
```
|
|
||||||
|
|
||||||
frigate.yml
|
|
||||||
|
|
||||||
```yaml
|
|
||||||
database:
|
|
||||||
path: /db/frigate.db
|
|
||||||
```
|
|
||||||
|
|
||||||
### Calculating required shm-size
|
### Calculating required shm-size
|
||||||
|
|
||||||
Frigate utilizes shared memory to store frames during processing. The default `shm-size` provided by Docker is 64m.
|
Frigate utilizes shared memory to store frames during processing. The default `shm-size` provided by Docker is **64MB**.
|
||||||
|
|
||||||
The default shm-size of 64m is fine for setups with 2 or less 1080p cameras. If frigate is exiting with "Bus error" messages, it is likely because you have too many high resolution cameras and you need to specify a higher shm size.
|
The default shm size of **64MB** is fine for setups with **2 cameras** detecting at **720p**. If Frigate is exiting with "Bus error" messages, it is likely because you have too many high resolution cameras and you need to specify a higher shm size.
|
||||||
|
|
||||||
You can calculate the necessary shm-size for each camera with the following formula using the resolution specified for detect:
|
The Frigate container also stores logs in shm, which can take up to **30MB**, so make sure to take this into account in your math as well.
|
||||||
|
|
||||||
```
|
You can calculate the necessary shm size for each camera with the following formula using the resolution specified for detect:
|
||||||
(width * height * 1.5 * 9 + 270480)/1048576 = <shm size in mb>
|
|
||||||
|
```console
|
||||||
|
# Replace <width> and <height>
|
||||||
|
$ python -c 'print("{:.2f}MB".format((<width> * <height> * 1.5 * 9 + 270480) / 1048576))'
|
||||||
|
|
||||||
|
# Example for 1280x720
|
||||||
|
$ python -c 'print("{:.2f}MB".format((1280 * 720 * 1.5 * 9 + 270480) / 1048576))'
|
||||||
|
12.12MB
|
||||||
|
|
||||||
|
# Example for eight cameras detecting at 1280x720, including logs
|
||||||
|
$ python -c 'print("{:.2f}MB".format(((1280 * 720 * 1.5 * 9 + 270480) / 1048576) * 8 + 30))'
|
||||||
|
126.99MB
|
||||||
```
|
```
|
||||||
|
|
||||||
The shm size cannot be set per container for Home Assistant Addons. You must set `default-shm-size` in `/etc/docker/daemon.json` to increase the default shm size. This will increase the shm size for all of your docker containers. This may or may not cause issues with your setup. https://docs.docker.com/engine/reference/commandline/dockerd/#daemon-configuration-file
|
The shm size cannot be set per container for Home Assistant add-ons. However, this is probably not required since by default Home Assistant Supervisor allocates `/dev/shm` with half the size of your total memory. If your machine has 8GB of memory, chances are that Frigate will have access to up to 4GB without any additional configuration.
|
||||||
|
|
||||||
|
|
||||||
### Raspberry Pi 3/4
|
### Raspberry Pi 3/4
|
||||||
|
|
||||||
@ -103,7 +90,7 @@ services:
|
|||||||
container_name: frigate
|
container_name: frigate
|
||||||
privileged: true # this may not be necessary for all setups
|
privileged: true # this may not be necessary for all setups
|
||||||
restart: unless-stopped
|
restart: unless-stopped
|
||||||
image: blakeblackshear/frigate:stable
|
image: ghcr.io/blakeblackshear/frigate:stable
|
||||||
shm_size: "64mb" # update for your cameras based on calculation above
|
shm_size: "64mb" # update for your cameras based on calculation above
|
||||||
devices:
|
devices:
|
||||||
- /dev/bus/usb:/dev/bus/usb # passes the USB Coral, needs to be modified for other versions
|
- /dev/bus/usb:/dev/bus/usb # passes the USB Coral, needs to be modified for other versions
|
||||||
@ -111,7 +98,7 @@ services:
|
|||||||
- /dev/dri/renderD128 # for intel hwaccel, needs to be updated for your hardware
|
- /dev/dri/renderD128 # for intel hwaccel, needs to be updated for your hardware
|
||||||
volumes:
|
volumes:
|
||||||
- /etc/localtime:/etc/localtime:ro
|
- /etc/localtime:/etc/localtime:ro
|
||||||
- /path/to/your/config.yml:/config/config.yml
|
- /path/to/your/config:/config
|
||||||
- /path/to/your/storage:/media/frigate
|
- /path/to/your/storage:/media/frigate
|
||||||
- type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
|
- type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
|
||||||
target: /tmp/cache
|
target: /tmp/cache
|
||||||
@ -119,7 +106,9 @@ services:
|
|||||||
size: 1000000000
|
size: 1000000000
|
||||||
ports:
|
ports:
|
||||||
- "5000:5000"
|
- "5000:5000"
|
||||||
- "1935:1935" # RTMP feeds
|
- "8554:8554" # RTSP feeds
|
||||||
|
- "8555:8555/tcp" # WebRTC over tcp
|
||||||
|
- "8555:8555/udp" # WebRTC over udp
|
||||||
environment:
|
environment:
|
||||||
FRIGATE_RTSP_PASSWORD: "password"
|
FRIGATE_RTSP_PASSWORD: "password"
|
||||||
```
|
```
|
||||||
@ -135,19 +124,24 @@ docker run -d \
|
|||||||
--device /dev/dri/renderD128 \
|
--device /dev/dri/renderD128 \
|
||||||
--shm-size=64m \
|
--shm-size=64m \
|
||||||
-v /path/to/your/storage:/media/frigate \
|
-v /path/to/your/storage:/media/frigate \
|
||||||
-v /path/to/your/config.yml:/config/config.yml \
|
-v /path/to/your/config:/config \
|
||||||
-v /etc/localtime:/etc/localtime:ro \
|
-v /etc/localtime:/etc/localtime:ro \
|
||||||
-e FRIGATE_RTSP_PASSWORD='password' \
|
-e FRIGATE_RTSP_PASSWORD='password' \
|
||||||
-p 5000:5000 \
|
-p 5000:5000 \
|
||||||
-p 1935:1935 \
|
-p 8554:8554 \
|
||||||
blakeblackshear/frigate:stable
|
-p 8555:8555/tcp \
|
||||||
|
-p 8555:8555/udp \
|
||||||
|
ghcr.io/blakeblackshear/frigate:stable
|
||||||
```
|
```
|
||||||
|
|
||||||
## Home Assistant Operating System (HassOS)
|
## Home Assistant Operating System (HassOS)
|
||||||
|
|
||||||
:::caution
|
:::caution
|
||||||
|
|
||||||
Due to limitations in Home Assistant Operating System, utilizing external storage for recordings or snapshots requires [modifying udev rules manually](https://community.home-assistant.io/t/solved-mount-usb-drive-in-hassio-to-be-used-on-the-media-folder-with-udev-customization/258406/46).
|
There are important limitations in Home Assistant Operating System to be aware of:
|
||||||
|
- Utilizing external storage for recordings or snapshots requires [modifying udev rules manually](https://community.home-assistant.io/t/solved-mount-usb-drive-in-hassio-to-be-used-on-the-media-folder-with-udev-customization/258406/46).
|
||||||
|
- AMD GPUs are not supported because HA OS does not include the mesa driver.
|
||||||
|
- Nvidia GPUs are not supported because addons do not support the nvidia runtime.
|
||||||
|
|
||||||
:::
|
:::
|
||||||
|
|
||||||
@ -163,7 +157,7 @@ HassOS users can install via the addon repository.
|
|||||||
2. Add https://github.com/blakeblackshear/frigate-hass-addons
|
2. Add https://github.com/blakeblackshear/frigate-hass-addons
|
||||||
3. Install your desired Frigate NVR Addon and navigate to it's page
|
3. Install your desired Frigate NVR Addon and navigate to it's page
|
||||||
4. Setup your network configuration in the `Configuration` tab
|
4. Setup your network configuration in the `Configuration` tab
|
||||||
5. (not for proxy addon) Create the file `frigate.yml` in your `config` directory with your detailed Frigate configuration
|
5. (not for proxy addon) Create the file `frigate.yaml` in your `config` directory with your detailed Frigate configuration
|
||||||
6. Start the addon container
|
6. Start the addon container
|
||||||
7. (not for proxy addon) If you are using hardware acceleration for ffmpeg, you may need to disable "Protection mode"
|
7. (not for proxy addon) If you are using hardware acceleration for ffmpeg, you may need to disable "Protection mode"
|
||||||
|
|
||||||
@ -178,6 +172,13 @@ There are several versions of the addon available:
|
|||||||
|
|
||||||
## Home Assistant Supervised
|
## Home Assistant Supervised
|
||||||
|
|
||||||
|
:::caution
|
||||||
|
|
||||||
|
There are important limitations in Home Assistant Supervised to be aware of:
|
||||||
|
- Nvidia GPUs are not supported because addons do not support the nvidia runtime.
|
||||||
|
|
||||||
|
:::
|
||||||
|
|
||||||
:::tip
|
:::tip
|
||||||
|
|
||||||
If possible, it is recommended to run Frigate standalone in Docker and use [Frigate's Proxy Addon](https://github.com/blakeblackshear/frigate-hass-addons/blob/main/frigate_proxy/README.md).
|
If possible, it is recommended to run Frigate standalone in Docker and use [Frigate's Proxy Addon](https://github.com/blakeblackshear/frigate-hass-addons/blob/main/frigate_proxy/README.md).
|
||||||
@ -211,3 +212,109 @@ It is recommended to run Frigate in LXC for maximum performance. See [this discu
|
|||||||
## ESX
|
## ESX
|
||||||
|
|
||||||
For details on running Frigate under ESX, see details [here](https://github.com/blakeblackshear/frigate/issues/305).
|
For details on running Frigate under ESX, see details [here](https://github.com/blakeblackshear/frigate/issues/305).
|
||||||
|
|
||||||
|
## Synology NAS on DSM 7
|
||||||
|
|
||||||
|
These settings were tested on DSM 7.1.1-42962 Update 4
|
||||||
|
|
||||||
|
|
||||||
|
**General:**
|
||||||
|
|
||||||
|
The `Execute container using high privilege` option needs to be enabled in order to give the frigate container the elevated privileges it may need.
|
||||||
|
|
||||||
|
The `Enable auto-restart` option can be enabled if you want the container to automatically restart whenever it improperly shuts down due to an error.
|
||||||
|
|
||||||
|
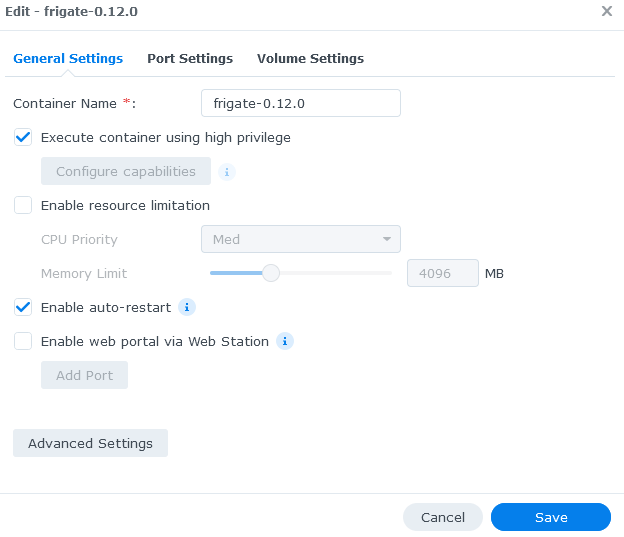
|
||||||
|
|
||||||
|
|
||||||
|
**Advanced Settings:**
|
||||||
|
|
||||||
|
If you want to use the password template feature, you should add the "FRIGATE_RTSP_PASSWORD" environment variable and set it to your preferred password under advanced settings. The rest of the environment variables should be left as default for now.
|
||||||
|
|
||||||
|
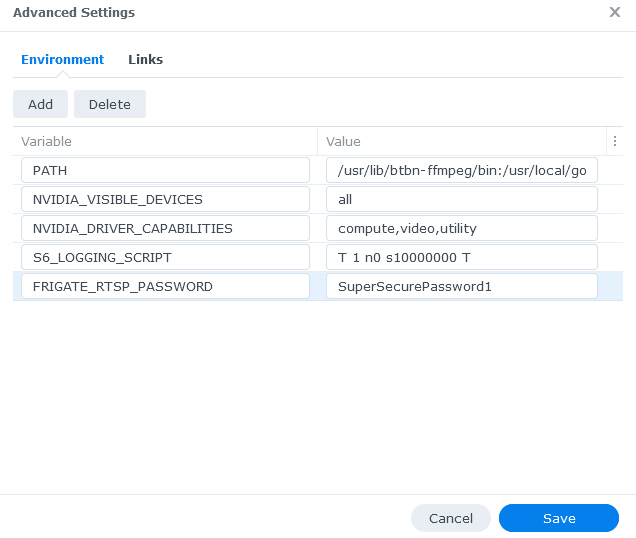
|
||||||
|
|
||||||
|
|
||||||
|
**Port Settings:**
|
||||||
|
|
||||||
|
The network mode should be set to `bridge`. You need to map the default frigate container ports to your local Synology NAS ports that you want to use to access Frigate.
|
||||||
|
|
||||||
|
There may be other services running on your NAS that are using the same ports that frigate uses. In that instance you can set the ports to auto or a specific port.
|
||||||
|
|
||||||
|
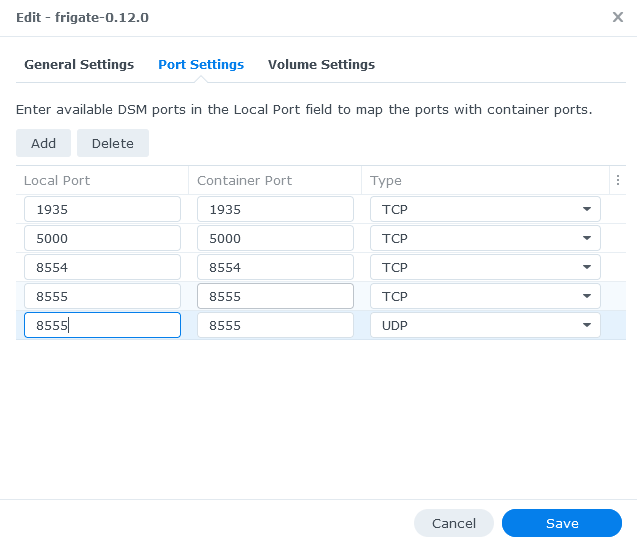
|
||||||
|
|
||||||
|
|
||||||
|
**Volume Settings:**
|
||||||
|
|
||||||
|
You need to configure 2 paths:
|
||||||
|
|
||||||
|
- The location of your config file in yaml format, this needs to be file and you need to go to the location of where your config.yml is located, this will be different depending on your NAS folder structure e.g. `/docker/frigate/config/config.yml` will mount to `/config/config.yml` within the container.
|
||||||
|
- The location on your NAS where the recordings will be saved this needs to be a folder e.g. `/docker/volumes/frigate-0-media`
|
||||||
|
|
||||||
|
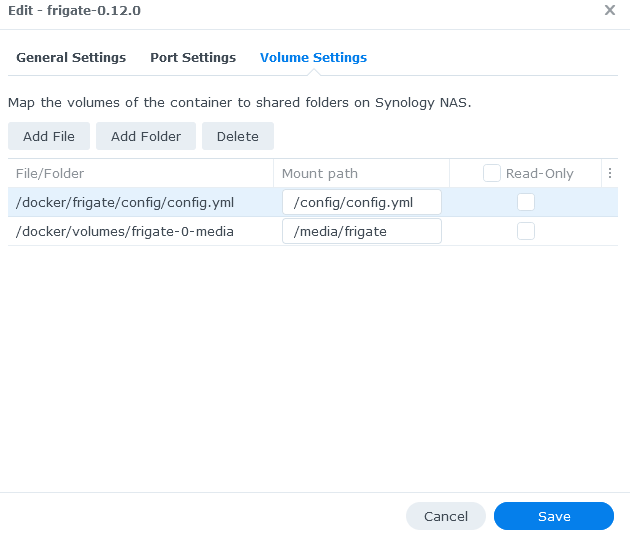
|
||||||
|
|
||||||
|
## QNAP NAS
|
||||||
|
|
||||||
|
These instructions were tested on a QNAP with an Intel J3455 CPU and 16G RAM, running QTS 4.5.4.2117.
|
||||||
|
|
||||||
|
QNAP has a graphic tool named Container Station to intall and manage docker containers. However, there are two limitations with Container Station that make it unsuitable to install Frigate:
|
||||||
|
|
||||||
|
1. Container Station does not incorporate GitHub Container Registry (ghcr), which hosts Frigate docker image version 0.12.0 and above.
|
||||||
|
2. Container Station uses default 64 Mb shared memory size (shm-size), and does not have a mechanism to adjust it. Frigate requires a larger shm-size to be able to work properly with more than two high resolution cameras.
|
||||||
|
|
||||||
|
Because of above limitations, the installation has to be done from command line. Here are the steps:
|
||||||
|
|
||||||
|
**Preparation**
|
||||||
|
1. Install Container Station from QNAP App Center if it is not installed.
|
||||||
|
2. Enable ssh on your QNAP (please do an Internet search on how to do this).
|
||||||
|
3. Prepare Frigate config file, name it `config.yml`.
|
||||||
|
4. Calculate shared memory size according to [documentation](https://docs.frigate.video/frigate/installation).
|
||||||
|
5. Find your time zone value from https://en.wikipedia.org/wiki/List_of_tz_database_time_zones
|
||||||
|
6. ssh to QNAP.
|
||||||
|
|
||||||
|
**Installation**
|
||||||
|
|
||||||
|
Run the following commands to install Frigate (using `stable` version as example):
|
||||||
|
```bash
|
||||||
|
# Download Frigate image
|
||||||
|
docker pull ghcr.io/blakeblackshear/frigate:stable
|
||||||
|
# Create directory to host Frigate config file on QNAP file system.
|
||||||
|
# E.g., you can choose to create it under /share/Container.
|
||||||
|
mkdir -p /share/Container/frigate/config
|
||||||
|
# Copy the config file prepared in step 2 into the newly created config directory.
|
||||||
|
cp path/to/your/config/file /share/Container/frigate/config
|
||||||
|
# Create directory to host Frigate media files on QNAP file system.
|
||||||
|
# (if you have a surveilliance disk, create media directory on the surveilliance disk.
|
||||||
|
# Example command assumes share_vol2 is the surveilliance drive
|
||||||
|
mkdir -p /share/share_vol2/frigate/media
|
||||||
|
# Create Frigate docker container. Replace shm-size value with the value from preparation step 3.
|
||||||
|
# Also replace the time zone value for 'TZ' in the sample command.
|
||||||
|
# Example command will create a docker container that uses at most 2 CPUs and 4G RAM.
|
||||||
|
# You may need to add "--env=LIBVA_DRIVER_NAME=i965 \" to the following docker run command if you
|
||||||
|
# have certain CPU (e.g., J4125). See https://docs.frigate.video/configuration/hardware_acceleration.
|
||||||
|
docker run \
|
||||||
|
--name=frigate \
|
||||||
|
--shm-size=256m \
|
||||||
|
--restart=unless-stopped \
|
||||||
|
--env=TZ=America/New_York \
|
||||||
|
--volume=/share/Container/frigate/config:/config:rw \
|
||||||
|
--volume=/share/share_vol2/frigate/media:/media/frigate:rw \
|
||||||
|
--network=bridge \
|
||||||
|
--privileged \
|
||||||
|
--workdir=/opt/frigate \
|
||||||
|
-p 1935:1935 \
|
||||||
|
-p 5000:5000 \
|
||||||
|
-p 8554:8554 \
|
||||||
|
-p 8555:8555 \
|
||||||
|
-p 8555:8555/udp \
|
||||||
|
--label='com.qnap.qcs.network.mode=nat' \
|
||||||
|
--label='com.qnap.qcs.gpu=False' \
|
||||||
|
--memory="4g" \
|
||||||
|
--cpus="2" \
|
||||||
|
--detach=true \
|
||||||
|
-t \
|
||||||
|
ghcr.io/blakeblackshear/frigate:stable
|
||||||
|
```
|
||||||
|
|
||||||
|
Log into QNAP, open Container Station. Frigate docker container should be listed under 'Overview' and running. Visit Frigate Web UI by clicking Frigate docker, and then clicking the URL shown at the top of the detail page.
|
||||||
|
|
||||||
|
|
||||||
|
|||||||
83
docs/docs/guides/configuring_go2rtc.md
Normal file
83
docs/docs/guides/configuring_go2rtc.md
Normal file
@ -0,0 +1,83 @@
|
|||||||
|
---
|
||||||
|
id: configuring_go2rtc
|
||||||
|
title: Configuring go2rtc
|
||||||
|
---
|
||||||
|
|
||||||
|
Use of the bundled go2rtc is optional. You can still configure FFmpeg to connect directly to your cameras. However, adding go2rtc to your configuration is required for the following features:
|
||||||
|
|
||||||
|
- WebRTC or MSE for live viewing with higher resolutions and frame rates than the jsmpeg stream which is limited to the detect stream
|
||||||
|
- RTSP (instead of RTMP) relay for use with Home Assistant or other consumers to reduce the number of connections to your camera streams
|
||||||
|
|
||||||
|
# Setup a go2rtc stream
|
||||||
|
|
||||||
|
First, you will want to configure go2rtc to connect to your camera stream by adding the stream you want to use for live view in your Frigate config file. If you set the stream name under go2rtc to match the name of your camera, it will automatically be mapped and you will get additional live view options for the camera. Avoid changing any other parts of your config at this step. Note that go2rtc supports [many different stream types](https://github.com/AlexxIT/go2rtc/tree/v1.5.0#module-streams), not just rtsp.
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
back:
|
||||||
|
- rtsp://user:password@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||||
|
```
|
||||||
|
|
||||||
|
The easiest live view to get working is MSE. After adding this to the config, restart Frigate and try to watch the live stream by selecting MSE in the dropdown after clicking on the camera.
|
||||||
|
|
||||||
|
### What if my video doesn't play?
|
||||||
|
|
||||||
|
If you are unable to see your video feed, first check the go2rtc logs in the Frigate UI under Logs in the sidebar. If go2rtc is having difficulty connecting to your camera, you should see some error messages in the log. If you do not see any errors, then the video codec of the stream may not be supported in your browser. If your camera stream is set to H265, try switching to H264. You can see more information about [video codec compatibility](https://github.com/AlexxIT/go2rtc/tree/v1.5.0#codecs-madness) in the go2rtc documentation. If you are not able to switch your camera settings from H265 to H264 or your stream is a different format such as MJPEG, you can use go2rtc to re-encode the video using the [FFmpeg parameters](https://github.com/AlexxIT/go2rtc/tree/v1.5.0#source-ffmpeg). It supports rotating and resizing video feeds and hardware acceleration. Keep in mind that transcoding video from one format to another is a resource intensive task and you may be better off using the built-in jsmpeg view. Here is an example of a config that will re-encode the stream to H264 without hardware acceleration:
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
back:
|
||||||
|
- rtsp://user:password@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||||
|
- "ffmpeg:back#video=h264"
|
||||||
|
```
|
||||||
|
|
||||||
|
Some camera streams may need to use the ffmpeg module in go2rtc. This has the downside of slower startup times, but has compatibility with more stream types.
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
back:
|
||||||
|
- ffmpeg:rtsp://user:password@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||||
|
```
|
||||||
|
|
||||||
|
If you can see the video but do not have audio, this is most likely because your camera's audio stream is not AAC. If possible, update your camera's audio settings to AAC. If your cameras do not support AAC audio, you will need to tell go2rtc to re-encode the audio to AAC on demand if you want audio. This will use additional CPU and add some latency. To add AAC audio on demand, you can update your go2rtc config as follows:
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
back:
|
||||||
|
- rtsp://user:password@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||||
|
- "ffmpeg:back#audio=aac"
|
||||||
|
```
|
||||||
|
|
||||||
|
If you need to convert **both** the audio and video streams, you can use the following:
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
back:
|
||||||
|
- rtsp://user:password@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||||
|
- "ffmpeg:back#video=h264#audio=aac"
|
||||||
|
```
|
||||||
|
|
||||||
|
When using the ffmpeg module, you would add AAC audio like this:
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
go2rtc:
|
||||||
|
streams:
|
||||||
|
back:
|
||||||
|
- "ffmpeg:rtsp://user:password@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2#video=copy#audio=copy#audio=aac"
|
||||||
|
```
|
||||||
|
|
||||||
|
:::caution
|
||||||
|
|
||||||
|
To access the go2rtc stream externally when utilizing the Frigate Add-On (for instance through VLC), you must first enable the RTSP Restream port. You can do this by visiting the Frigate Add-On configuration page within Home Assistant and revealing the hidden options under the "Show disabled ports" section.
|
||||||
|
|
||||||
|
:::
|
||||||
|
|
||||||
|
## Next steps
|
||||||
|
|
||||||
|
1. If the stream you added to go2rtc is also used by Frigate for the `record` or `detect` role, you can migrate your config to pull from the RTSP restream to reduce the number of connections to your camera as shown [here](/configuration/restream#reduce-connections-to-camera).
|
||||||
|
1. You may also prefer to [setup WebRTC](/configuration/live#webrtc-extra-configuration) for slightly lower latency than MSE. Note that WebRTC only supports h264 and specific audio formats.
|
||||||
@ -1,10 +0,0 @@
|
|||||||
---
|
|
||||||
id: events_setup
|
|
||||||
title: Setting Up Events
|
|
||||||
---
|
|
||||||
|
|
||||||
[Snapshots](../configuration/snapshots.md) and/or [Recordings](../configuration/record.md) must be enabled for events to be created for detected objects.
|
|
||||||
|
|
||||||
## Limiting Events to Areas of Interest
|
|
||||||
|
|
||||||
The best way to limit events to areas of interest is to use [zones](../configuration/zones.md) along with `required_zones` for events and snapshots to only have events created in areas of interest.
|
|
||||||
@ -20,4 +20,4 @@ For object filters in your configuration, any single detection below `min_score`
|
|||||||
| 5 | 0.88 | 0.7, 0.85, 0.95, 0.90, 0.88 | 0.88 | Yes |
|
| 5 | 0.88 | 0.7, 0.85, 0.95, 0.90, 0.88 | 0.88 | Yes |
|
||||||
| 6 | 0.95 | 0.7, 0.85, 0.95, 0.90, 0.88, 0.95 | 0.89 | Yes |
|
| 6 | 0.95 | 0.7, 0.85, 0.95, 0.90, 0.88, 0.95 | 0.89 | Yes |
|
||||||
|
|
||||||
In frame 2, the score is below the `min_score` value, so frigate ignores it and it becomes a 0.0. The computed score is the median of the score history (padding to at least 3 values), and only when that computed score crosses the `threshold` is the object marked as a true positive. That happens in frame 4 in the example.
|
In frame 2, the score is below the `min_score` value, so Frigate ignores it and it becomes a 0.0. The computed score is the median of the score history (padding to at least 3 values), and only when that computed score crosses the `threshold` is the object marked as a true positive. That happens in frame 4 in the example.
|
||||||
|
|||||||
@ -1,124 +1,81 @@
|
|||||||
---
|
---
|
||||||
id: getting_started
|
id: getting_started
|
||||||
title: Creating a config file
|
title: Getting started
|
||||||
---
|
---
|
||||||
|
|
||||||
This guide walks through the steps to build a configuration file for Frigate. It assumes that you already have an environment setup as described in [Installation](../frigate/installation.md). You should also configure your cameras according to the [camera setup guide](/guides/camera_setup)
|
This guide walks through the steps to build a configuration file for Frigate. It assumes that you already have an environment setup as described in [Installation](../frigate/installation.md). You should also configure your cameras according to the [camera setup guide](/frigate/camera_setup). Pay particular attention to the section on choosing a detect resolution.
|
||||||
|
|
||||||
### Step 1: Configure the MQTT server (Optional)
|
### Step 1: Add a detect stream
|
||||||
|
|
||||||
Use of a functioning MQTT server is optional for frigate, but required for the home assistant integration. Start by adding the mqtt section at the top level in your config:
|
First we will add the detect stream for the camera:
|
||||||
|
|
||||||
If using mqtt:
|
|
||||||
```yaml
|
|
||||||
mqtt:
|
|
||||||
host: <ip of your mqtt server>
|
|
||||||
```
|
|
||||||
|
|
||||||
If not using mqtt:
|
|
||||||
```yaml
|
```yaml
|
||||||
mqtt:
|
mqtt:
|
||||||
enabled: False
|
enabled: False
|
||||||
```
|
|
||||||
|
|
||||||
If using the Mosquitto Addon in Home Assistant, a username and password is required. For example:
|
|
||||||
|
|
||||||
```yaml
|
|
||||||
mqtt:
|
|
||||||
host: <ip of your mqtt server>
|
|
||||||
user: <username>
|
|
||||||
password: <password>
|
|
||||||
```
|
|
||||||
|
|
||||||
Frigate supports many configuration options for mqtt. See the [configuration reference](../configuration/index.md#full-configuration-reference) for more info.
|
|
||||||
|
|
||||||
### Step 2: Configure detectors
|
|
||||||
|
|
||||||
By default, Frigate will use a single CPU detector. If you have a USB Coral, you will need to add a detectors section to your config.
|
|
||||||
|
|
||||||
```yaml
|
|
||||||
mqtt:
|
|
||||||
host: <ip of your mqtt server>
|
|
||||||
|
|
||||||
detectors:
|
|
||||||
coral:
|
|
||||||
type: edgetpu
|
|
||||||
device: usb
|
|
||||||
```
|
|
||||||
|
|
||||||
More details on available detectors can be found [here](../configuration/detectors.md).
|
|
||||||
|
|
||||||
### Step 3: Add a minimal camera configuration
|
|
||||||
|
|
||||||
Now let's add the first camera:
|
|
||||||
|
|
||||||
```yaml
|
|
||||||
mqtt:
|
|
||||||
host: <ip of your mqtt server>
|
|
||||||
|
|
||||||
detectors:
|
|
||||||
coral:
|
|
||||||
type: edgetpu
|
|
||||||
device: usb
|
|
||||||
|
|
||||||
cameras:
|
cameras:
|
||||||
camera_1: # <------ Name the camera
|
name_of_your_camera: # <------ Name the camera
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
inputs:
|
inputs:
|
||||||
- path: rtsp://10.0.10.10:554/rtsp # <----- Update for your camera
|
- path: rtsp://10.0.10.10:554/rtsp # <----- The stream you want to use for detection
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
- rtmp
|
|
||||||
rtmp:
|
|
||||||
enabled: False # <-- RTMP should be disabled if your stream is not H264
|
|
||||||
detect:
|
detect:
|
||||||
|
enabled: False # <---- disable detection until you have a working camera feed
|
||||||
width: 1280 # <---- update for your camera's resolution
|
width: 1280 # <---- update for your camera's resolution
|
||||||
height: 720 # <---- update for your camera's resolution
|
height: 720 # <---- update for your camera's resolution
|
||||||
```
|
```
|
||||||
|
|
||||||
### Step 4: Start Frigate
|
### Step 2: Start Frigate
|
||||||
|
|
||||||
At this point you should be able to start Frigate and see the the video feed in the UI.
|
At this point you should be able to start Frigate and see the the video feed in the UI.
|
||||||
|
|
||||||
If you get a green image from the camera, this means ffmpeg was not able to get the video feed from your camera. Check the logs for error messages from ffmpeg. The default ffmpeg arguments are designed to work with H264 RTSP cameras that support TCP connections. If you do not have H264 cameras, make sure you have disabled RTMP. It is possible to enable it, but you must tell ffmpeg to re-encode the video with customized output args.
|
If you get an error image from the camera, this means ffmpeg was not able to get the video feed from your camera. Check the logs for error messages from ffmpeg. The default ffmpeg arguments are designed to work with H264 RTSP cameras that support TCP connections.
|
||||||
|
|
||||||
FFmpeg arguments for other types of cameras can be found [here](../configuration/camera_specific.md).
|
FFmpeg arguments for other types of cameras can be found [here](../configuration/camera_specific.md).
|
||||||
|
|
||||||
### Step 5: Configure hardware acceleration (optional)
|
### Step 3: Configure hardware acceleration (recommended)
|
||||||
|
|
||||||
Now that you have a working camera configuration, you want to setup hardware acceleration to minimize the CPU required to decode your video streams. See the [hardware acceleration](../configuration/hardware_acceleration.md) config reference for examples applicable to your hardware.
|
Now that you have a working camera configuration, you want to setup hardware acceleration to minimize the CPU required to decode your video streams. See the [hardware acceleration](../configuration/hardware_acceleration.md) config reference for examples applicable to your hardware.
|
||||||
|
|
||||||
In order to best evaluate the performance impact of hardware acceleration, it is recommended to temporarily disable detection.
|
Here is an example configuration with hardware acceleration configured for Intel processors with an integrated GPU using the [preset](../configuration/ffmpeg_presets.md):
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
mqtt: ...
|
mqtt: ...
|
||||||
|
|
||||||
detectors: ...
|
|
||||||
|
|
||||||
cameras:
|
cameras:
|
||||||
camera_1:
|
name_of_your_camera:
|
||||||
ffmpeg: ...
|
|
||||||
detect:
|
|
||||||
enabled: False
|
|
||||||
...
|
|
||||||
```
|
|
||||||
|
|
||||||
Here is an example configuration with hardware acceleration configured:
|
|
||||||
|
|
||||||
```yaml
|
|
||||||
mqtt: ...
|
|
||||||
|
|
||||||
detectors: ...
|
|
||||||
|
|
||||||
cameras:
|
|
||||||
camera_1:
|
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
inputs: ...
|
inputs: ...
|
||||||
hwaccel_args: -c:v h264_v4l2m2m
|
hwaccel_args: preset-vaapi
|
||||||
detect: ...
|
detect: ...
|
||||||
```
|
```
|
||||||
|
|
||||||
### Step 6: Setup motion masks
|
### Step 4: Configure detectors
|
||||||
|
|
||||||
|
By default, Frigate will use a single CPU detector. If you have a USB Coral, you will need to add a detectors section to your config.
|
||||||
|
|
||||||
|
```yaml
|
||||||
|
mqtt: ...
|
||||||
|
|
||||||
|
detectors: # <---- add detectors
|
||||||
|
coral:
|
||||||
|
type: edgetpu
|
||||||
|
device: usb
|
||||||
|
|
||||||
|
cameras:
|
||||||
|
name_of_your_camera:
|
||||||
|
ffmpeg: ...
|
||||||
|
detect:
|
||||||
|
enabled: True # <---- turn on detection
|
||||||
|
...
|
||||||
|
```
|
||||||
|
|
||||||
|
More details on available detectors can be found [here](../configuration/detectors.md).
|
||||||
|
|
||||||
|
Restart Frigate and you should start seeing detections for `person`. If you want to track other objects, they will need to be added according to the [configuration file reference](../configuration/index.md#full-configuration-reference).
|
||||||
|
|
||||||
|
### Step 5: Setup motion masks
|
||||||
|
|
||||||
Now that you have optimized your configuration for decoding the video stream, you will want to check to see where to implement motion masks. To do this, navigate to the camera in the UI, select "Debug" at the top, and enable "Motion boxes" in the options below the video feed. Watch for areas that continuously trigger unwanted motion to be detected. Common areas to mask include camera timestamps and trees that frequently blow in the wind. The goal is to avoid wasting object detection cycles looking at these areas.
|
Now that you have optimized your configuration for decoding the video stream, you will want to check to see where to implement motion masks. To do this, navigate to the camera in the UI, select "Debug" at the top, and enable "Motion boxes" in the options below the video feed. Watch for areas that continuously trigger unwanted motion to be detected. Common areas to mask include camera timestamps and trees that frequently blow in the wind. The goal is to avoid wasting object detection cycles looking at these areas.
|
||||||
|
|
||||||
@ -134,7 +91,7 @@ Your configuration should look similar to this now.
|
|||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
mqtt:
|
mqtt:
|
||||||
host: mqtt.local
|
enabled: False
|
||||||
|
|
||||||
detectors:
|
detectors:
|
||||||
coral:
|
coral:
|
||||||
@ -142,13 +99,12 @@ detectors:
|
|||||||
device: usb
|
device: usb
|
||||||
|
|
||||||
cameras:
|
cameras:
|
||||||
camera_1:
|
name_of_your_camera:
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
inputs:
|
inputs:
|
||||||
- path: rtsp://10.0.10.10:554/rtsp
|
- path: rtsp://10.0.10.10:554/rtsp
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
- rtmp
|
|
||||||
detect:
|
detect:
|
||||||
width: 1280
|
width: 1280
|
||||||
height: 720
|
height: 720
|
||||||
@ -157,9 +113,13 @@ cameras:
|
|||||||
- 0,461,3,0,1919,0,1919,843,1699,492,1344,458,1346,336,973,317,869,375,866,432
|
- 0,461,3,0,1919,0,1919,843,1699,492,1344,458,1346,336,973,317,869,375,866,432
|
||||||
```
|
```
|
||||||
|
|
||||||
### Step 7: Enable recording (optional)
|
### Step 6: Enable recording and/or snapshots
|
||||||
|
|
||||||
To enable recording video, add the `record` role to a stream and enable it in the config.
|
In order to see Events in the Frigate UI, either snapshots or record will need to be enabled.
|
||||||
|
|
||||||
|
#### Record
|
||||||
|
|
||||||
|
To enable recording video, add the `record` role to a stream and enable it in the config. If record is disabled in the config, turning it on via the UI will not have any effect.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
mqtt: ...
|
mqtt: ...
|
||||||
@ -167,14 +127,13 @@ mqtt: ...
|
|||||||
detectors: ...
|
detectors: ...
|
||||||
|
|
||||||
cameras:
|
cameras:
|
||||||
camera_1:
|
name_of_your_camera:
|
||||||
ffmpeg:
|
ffmpeg:
|
||||||
inputs:
|
inputs:
|
||||||
- path: rtsp://10.0.10.10:554/rtsp
|
- path: rtsp://10.0.10.10:554/rtsp
|
||||||
roles:
|
roles:
|
||||||
- detect
|
- detect
|
||||||
- rtmp
|
- path: rtsp://10.0.10.10:554/high_res_stream # <----- Add stream you want to record from
|
||||||
- path: rtsp://10.0.10.10:554/high_res_stream # <----- Add high res stream
|
|
||||||
roles:
|
roles:
|
||||||
- record
|
- record
|
||||||
detect: ...
|
detect: ...
|
||||||
@ -187,9 +146,9 @@ If you don't have separate streams for detect and record, you would just add the
|
|||||||
|
|
||||||
By default, Frigate will retain video of all events for 10 days. The full set of options for recording can be found [here](../configuration/index.md#full-configuration-reference).
|
By default, Frigate will retain video of all events for 10 days. The full set of options for recording can be found [here](../configuration/index.md#full-configuration-reference).
|
||||||
|
|
||||||
### Step 8: Enable snapshots (optional)
|
#### Snapshots
|
||||||
|
|
||||||
To enable snapshots of your events, just enable it in the config.
|
To enable snapshots of your events, just enable it in the config. Snapshots are taken from the detect stream because it is the only stream decoded.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
mqtt: ...
|
mqtt: ...
|
||||||
@ -197,7 +156,7 @@ mqtt: ...
|
|||||||
detectors: ...
|
detectors: ...
|
||||||
|
|
||||||
cameras:
|
cameras:
|
||||||
camera_1: ...
|
name_of_your_camera: ...
|
||||||
detect: ...
|
detect: ...
|
||||||
record: ...
|
record: ...
|
||||||
snapshots: # <----- Enable snapshots
|
snapshots: # <----- Enable snapshots
|
||||||
@ -206,3 +165,10 @@ cameras:
|
|||||||
```
|
```
|
||||||
|
|
||||||
By default, Frigate will retain snapshots of all events for 10 days. The full set of options for snapshots can be found [here](../configuration/index.md#full-configuration-reference).
|
By default, Frigate will retain snapshots of all events for 10 days. The full set of options for snapshots can be found [here](../configuration/index.md#full-configuration-reference).
|
||||||
|
|
||||||
|
### Step 7: Follow up guides
|
||||||
|
|
||||||
|
Now that you have a working install, you can use the following guides for additional features:
|
||||||
|
|
||||||
|
1. [Configuring go2rtc](configuring_go2rtc) - Additional live view options and RTSP relay
|
||||||
|
2. [Home Assistant Integration](../integrations/home-assistant.md) - Integrate with Home Assistant
|
||||||
|
|||||||
@ -3,11 +3,11 @@ id: ha_notifications
|
|||||||
title: Home Assistant notifications
|
title: Home Assistant notifications
|
||||||
---
|
---
|
||||||
|
|
||||||
The best way to get started with notifications for Frigate is to use the [Blueprint](https://community.home-assistant.io/t/frigate-mobile-app-notifications/311091). You can use the yaml generated from the Blueprint as a starting point and customize from there.
|
The best way to get started with notifications for Frigate is to use the [Blueprint](https://community.home-assistant.io/t/frigate-mobile-app-notifications-2-0/559732). You can use the yaml generated from the Blueprint as a starting point and customize from there.
|
||||||
|
|
||||||
It is generally recommended to trigger notifications based on the `frigate/events` mqtt topic. This provides the event_id needed to fetch [thumbnails/snapshots/clips](../integrations/home-assistant.md#notification-api) and other useful information to customize when and where you want to receive alerts. The data is published in the form of a change feed, which means you can reference the "previous state" of the object in the `before` section and the "current state" of the object in the `after` section. You can see an example [here](../integrations/mqtt.md#frigateevents).
|
It is generally recommended to trigger notifications based on the `frigate/events` mqtt topic. This provides the event_id needed to fetch [thumbnails/snapshots/clips](../integrations/home-assistant.md#notification-api) and other useful information to customize when and where you want to receive alerts. The data is published in the form of a change feed, which means you can reference the "previous state" of the object in the `before` section and the "current state" of the object in the `after` section. You can see an example [here](../integrations/mqtt.md#frigateevents).
|
||||||
|
|
||||||
Here is a simple example of a notification automation of events which will update the existing notification for each change. This means the image you see in the notification will update as frigate finds a "better" image.
|
Here is a simple example of a notification automation of events which will update the existing notification for each change. This means the image you see in the notification will update as Frigate finds a "better" image.
|
||||||
|
|
||||||
```yaml
|
```yaml
|
||||||
automation:
|
automation:
|
||||||
@ -45,7 +45,7 @@ automation:
|
|||||||
https://your.public.hass.address.com/api/frigate/notifications/{{trigger.payload_json["after"]["id"]}}/thumbnail.jpg
|
https://your.public.hass.address.com/api/frigate/notifications/{{trigger.payload_json["after"]["id"]}}/thumbnail.jpg
|
||||||
tag: '{{trigger.payload_json["after"]["id"]}}'
|
tag: '{{trigger.payload_json["after"]["id"]}}'
|
||||||
when: '{{trigger.payload_json["after"]["start_time"]|int}}'
|
when: '{{trigger.payload_json["after"]["start_time"]|int}}'
|
||||||
entity_id: camera.{{trigger.payload_json["after"]["camera"]}}
|
entity_id: camera.{{trigger.payload_json["after"]["camera"] | replace("-","_") | lower}}
|
||||||
mode: single
|
mode: single
|
||||||
```
|
```
|
||||||
|
|
||||||
|
|||||||
@ -1,6 +1,6 @@
|
|||||||
---
|
---
|
||||||
id: reverse_proxy
|
id: reverse_proxy
|
||||||
title: Setting up a Reverse Proxy
|
title: Setting up a reverse proxy
|
||||||
---
|
---
|
||||||
|
|
||||||
This guide outlines the basic configuration steps needed to expose your Frigate UI to the internet.
|
This guide outlines the basic configuration steps needed to expose your Frigate UI to the internet.
|
||||||
@ -8,6 +8,7 @@ A common way of accomplishing this is to use a reverse proxy webserver between y
|
|||||||
A reverse proxy accepts HTTP requests from the public internet and redirects them transparently to internal webserver(s) on your network.
|
A reverse proxy accepts HTTP requests from the public internet and redirects them transparently to internal webserver(s) on your network.
|
||||||
|
|
||||||
The suggested steps are:
|
The suggested steps are:
|
||||||
|
|
||||||
- **Configure** a 'proxy' HTTP webserver (such as [Apache2](https://httpd.apache.org/docs/current/) or [NPM](https://github.com/NginxProxyManager/nginx-proxy-manager)) and only expose ports 80/443 from this webserver to the internet
|
- **Configure** a 'proxy' HTTP webserver (such as [Apache2](https://httpd.apache.org/docs/current/) or [NPM](https://github.com/NginxProxyManager/nginx-proxy-manager)) and only expose ports 80/443 from this webserver to the internet
|
||||||
- **Encrypt** content from the proxy webserver by installing SSL (such as with [Let's Encrypt](https://letsencrypt.org/)). Note that SSL is then not required on your Frigate webserver as the proxy encrypts all requests for you
|
- **Encrypt** content from the proxy webserver by installing SSL (such as with [Let's Encrypt](https://letsencrypt.org/)). Note that SSL is then not required on your Frigate webserver as the proxy encrypts all requests for you
|
||||||
- **Restrict** access to your Frigate instance at the proxy using, for example, password authentication
|
- **Restrict** access to your Frigate instance at the proxy using, for example, password authentication
|
||||||
@ -31,6 +32,7 @@ On Debian Apache2 the configuration file will be named along the lines of `/etc/
|
|||||||
|
|
||||||
Make life easier for yourself by presenting your Frigate interface as a DNS sub-domain rather than as a sub-folder of your main domain.
|
Make life easier for yourself by presenting your Frigate interface as a DNS sub-domain rather than as a sub-folder of your main domain.
|
||||||
Here we access Frigate via https://cctv.mydomain.co.uk
|
Here we access Frigate via https://cctv.mydomain.co.uk
|
||||||
|
|
||||||
```xml
|
```xml
|
||||||
<VirtualHost *:443>
|
<VirtualHost *:443>
|
||||||
ServerName cctv.mydomain.co.uk
|
ServerName cctv.mydomain.co.uk
|
||||||
@ -82,3 +84,61 @@ There are many ways to authenticate a website but a straightforward approach is
|
|||||||
</Location>
|
</Location>
|
||||||
</VirtualHost>
|
</VirtualHost>
|
||||||
```
|
```
|
||||||
|
|
||||||
|
## Nginx Reverse Proxy
|
||||||
|
|
||||||
|
This method shows a working example for subdomain type reverse proxy with SSL enabled.
|
||||||
|
|
||||||
|
### Setup server and port to reverse proxy
|
||||||
|
|
||||||
|
This is set in `$server` and `$port` this should match your ports you have exposed to your docker container. Optionally you listen on port `443` and enable `SSL`
|
||||||
|
|
||||||
|
```
|
||||||
|
# ------------------------------------------------------------
|
||||||
|
# frigate.domain.com
|
||||||
|
# ------------------------------------------------------------
|
||||||
|
|
||||||
|
server {
|
||||||
|
set $forward_scheme http;
|
||||||
|
set $server "192.168.100.2"; # FRIGATE SERVER LOCATION
|
||||||
|
set $port 5000;
|
||||||
|
|
||||||
|
listen 80;
|
||||||
|
listen 443 ssl http2;
|
||||||
|
|
||||||
|
server_name frigate.domain.com;
|
||||||
|
}
|
||||||
|
```
|
||||||
|
|
||||||
|
### Setup SSL (optional)
|
||||||
|
|
||||||
|
This section points to your SSL files, the example below shows locations to a default Lets Encrypt SSL certificate.
|
||||||
|
|
||||||
|
```
|
||||||
|
# Let's Encrypt SSL
|
||||||
|
include conf.d/include/letsencrypt-acme-challenge.conf;
|
||||||
|
include conf.d/include/ssl-ciphers.conf;
|
||||||
|
ssl_certificate /etc/letsencrypt/live/npm-1/fullchain.pem;
|
||||||
|
ssl_certificate_key /etc/letsencrypt/live/npm-1/privkey.pem;
|
||||||
|
```
|
||||||
|
|
||||||
|
|
||||||
|
### Setup reverse proxy settings
|
||||||
|
|
||||||
|
Thhe settings below enabled connection upgrade, sets up logging (optional) and proxies everything from the `/` context to the docker host and port specified earlier in the configuration
|
||||||
|
|
||||||
|
```
|
||||||
|
proxy_set_header Upgrade $http_upgrade;
|
||||||
|
proxy_set_header Connection $http_connection;
|
||||||
|
proxy_http_version 1.1;
|
||||||
|
|
||||||
|
access_log /data/logs/proxy-host-40_access.log proxy;
|
||||||
|
error_log /data/logs/proxy-host-40_error.log warn;
|
||||||
|
|
||||||
|
location / {
|
||||||
|
proxy_set_header Upgrade $http_upgrade;
|
||||||
|
proxy_set_header Connection $http_connection;
|
||||||
|
proxy_http_version 1.1;
|
||||||
|
}
|
||||||
|
|
||||||
|
```
|
||||||
|
|||||||
Some files were not shown because too many files have changed in this diff Show More
Loading…
Reference in New Issue
Block a user